
Es muss wohl am Zeitgeist liegen:
Am vergangenen Wochenende hat einer meiner Kumpels, der enthusiastischste Biker den ich kenne, mit drei Motorrädern und insgesamt über 500 PS in seinem privaten Fuhrpark, eine Probefahrt auf einem Elektro-Bike unternommen, einer Zero SR/F:

«190 Nm, 110 PS, Sound of silence» war seine vorherige Ankündigung im hier schon mehrfach erwähnten Forum für Fahrer und Liebhaber grossvolumiger Bikes einer italienischen Zweiradmarke.
In einem Forum, dass sich anscheinend schwerpunktmässig mit der Geräuschemission sowie deren – ähem – «Optimierung» widmet, mit rund 1,3 Millionen Views in den Auspuffanlagen (Brummmmm!) threads, war die Ankündigung einer Testfahrt auf einem geräuschlosen Bike eine mutige und nahezu ketzerische Ansage. Eine, die man sich zur Vermeidung eines Shitstorms tunlichst nur leisten sollte, wenn man über ein ausserordentlich gutes «Standing» in der Community verfügt, und über jegliche «Weichei»-Verdächtigungen erhaben ist. Was bei meinem Kumpel allerdings beides gegeben ist.
190 Nm ist allerdings eine Ansage, die aufhorchen lässt. Denn die dremomentstärkste derzeit erhältliche Serien-Ducati bringt es auf lediglich etwa 130 Nm.
Ich konnte nicht widerstehen, dieser Herstellerangabe auf den Zahn zu fühlen. Denn mit Maximalangaben lässt sich bekanntlich leicht werben. Doch was würde davon tatsächlich übrig bleiben?
Zero beschreibt die Technischen Daten des Antriebs wie folgt:
Es fällt zunächst auf, daß ZeroMotorcycles zwischen Maximalleistung und Dauerleistung unterscheidet. Offensichtlich gibt es thermische Probleme, wenn man die Maximalleistung zu lange abruft. Der Hinweis auf einen «verbesserten thermischen Wirkungsgrad» spricht zusätzlich Bände. Ich lasse diesen Aspekt jetzt mal so stehen. Eine Monster fährt man schließlich auch nicht nur Vollgas.
Die Zero hat einen Direktantrieb, soll heissen: keinen Primärantrieb, keine Kupplung und kein Schaltgetriebe. Das wird dem Gesamtwirkungsgrad zweifellos zugute kommen. Es gibt allerdings eine Sekundärübersetzung, und zwar über einen Zahnriemen . Übersetzungsverhältnis hier: 20 / 90 Zähne. Das «Ritzel» sitzt direkt auf der Motorwelle, die übrigens exakt mit der Schwingendrehachse zusammenfällt.
Damit liegen an der Hinterradachse maximal
190 Nm * (90/20) = 855 Nm
an.
Aus dem Abrollumfang des Hinterrads der Dimension 180/55-17 von rund 1,90 m erhält man den Hinterrad-Radius , womit sich für die Zero eine
maximale Zugkraft am Hinterrad von rund 2’800 N
ergibt.
Das ist absolut respektabel, bleibt aber deutlich hinter den (maximal) 4’400 N der Monster 1200S zurück. Da hatten sich Einige im Forum sicher mehr versprochen, von den «190 Nm«.
Nur der Vollständigkeit halber: der Zugkraft- über Geschwindigkeitsverlauf ist ein direkter Indikator für das Beschleunigungsvermögen eines Motorrads. Da die Zero SR/F mit mindestens 220 kg Lergewicht (Werksangabe) noch rund 13 kg schwerer ist als eine Monster 1200S mit «fahrfertig 207 kg» (Trockengewicht: 187 kg lt. Werksangabe), dürfte klar sein, wer die Nase vorne hat und behält.
Für eine erste grafische Darstellung des Vergleichs zur Monster 1200S soll zugunsten der Zero SR/F angenommen werden, daß die maximale Zugkraft nur vom maximalen Drehmoment, oder von der maximalen Leistung abhängig ist, was immer zuerst begrenzt.
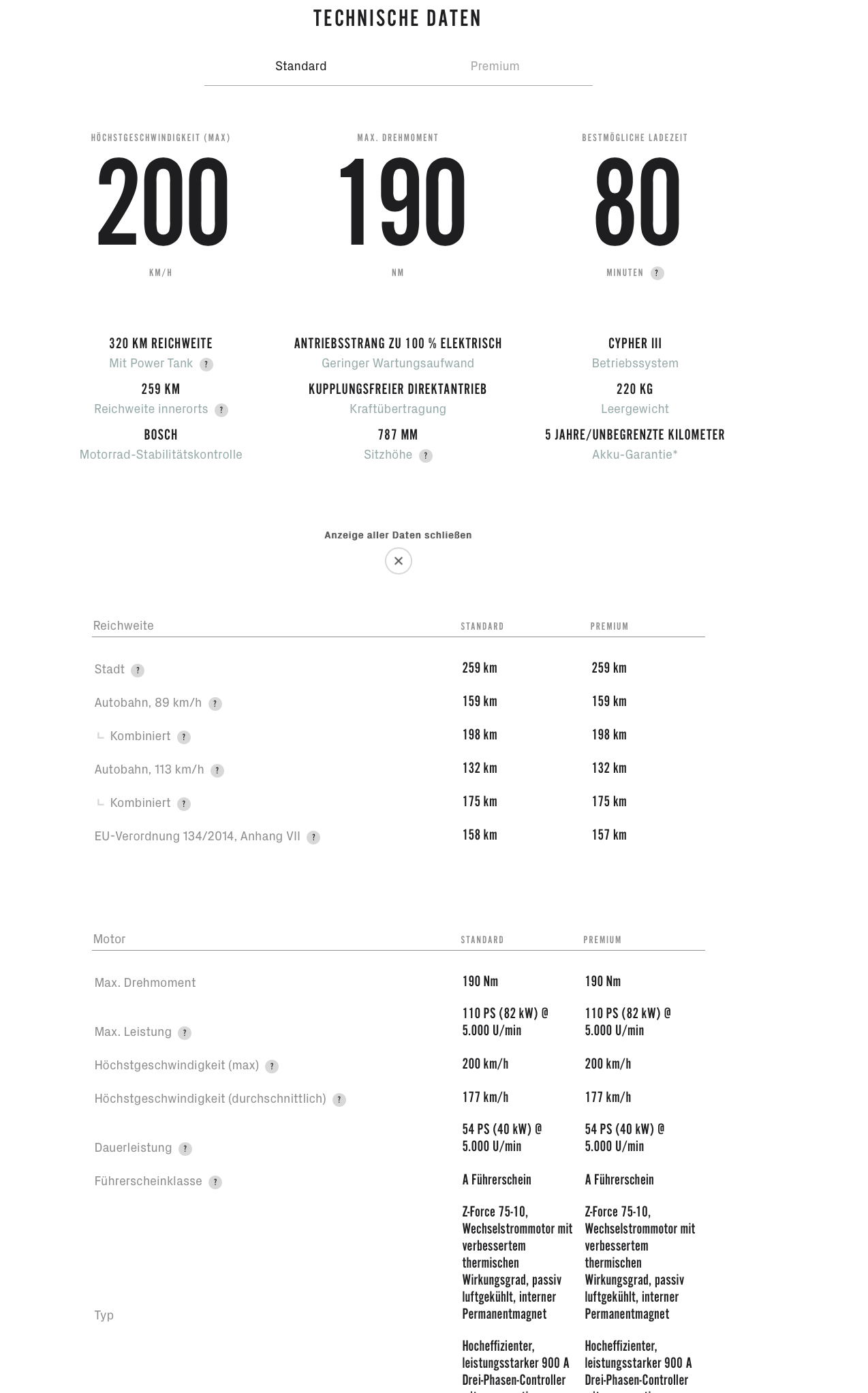
Mein interaktiver Zugkraft- und Sekundärübersetzungs-Simulator, den ich hier bereits vorgestellt hatte, liefert ersten Aufschluss:
Das obige Bild zeigt den best-möglichen Fall, bei dem die nur punktuell gültigen Herstellerangaben für den gesamten Geschwindigkeitsbereich als gültig angenommen werden. Bereits hier fällt die Zero ab ca. 20 km/h in der Zugkraft hinter die Monster zurück.
Tatsächlich sieht es schlechter aus für die Zero, denn der bestmögliche Fall ist von der Realität ein Stück weit entfernt:
angenommen, das Drehmoment im Stand beträgt tatsächlich 190 Nm.
Dann ist der Drehmomentverlauf trotzdem nicht linear, sondern fällt aus physikalischen Gründen (mehr dazu weiter unten) mit zunehmender Motordrehzahl beständig ab.
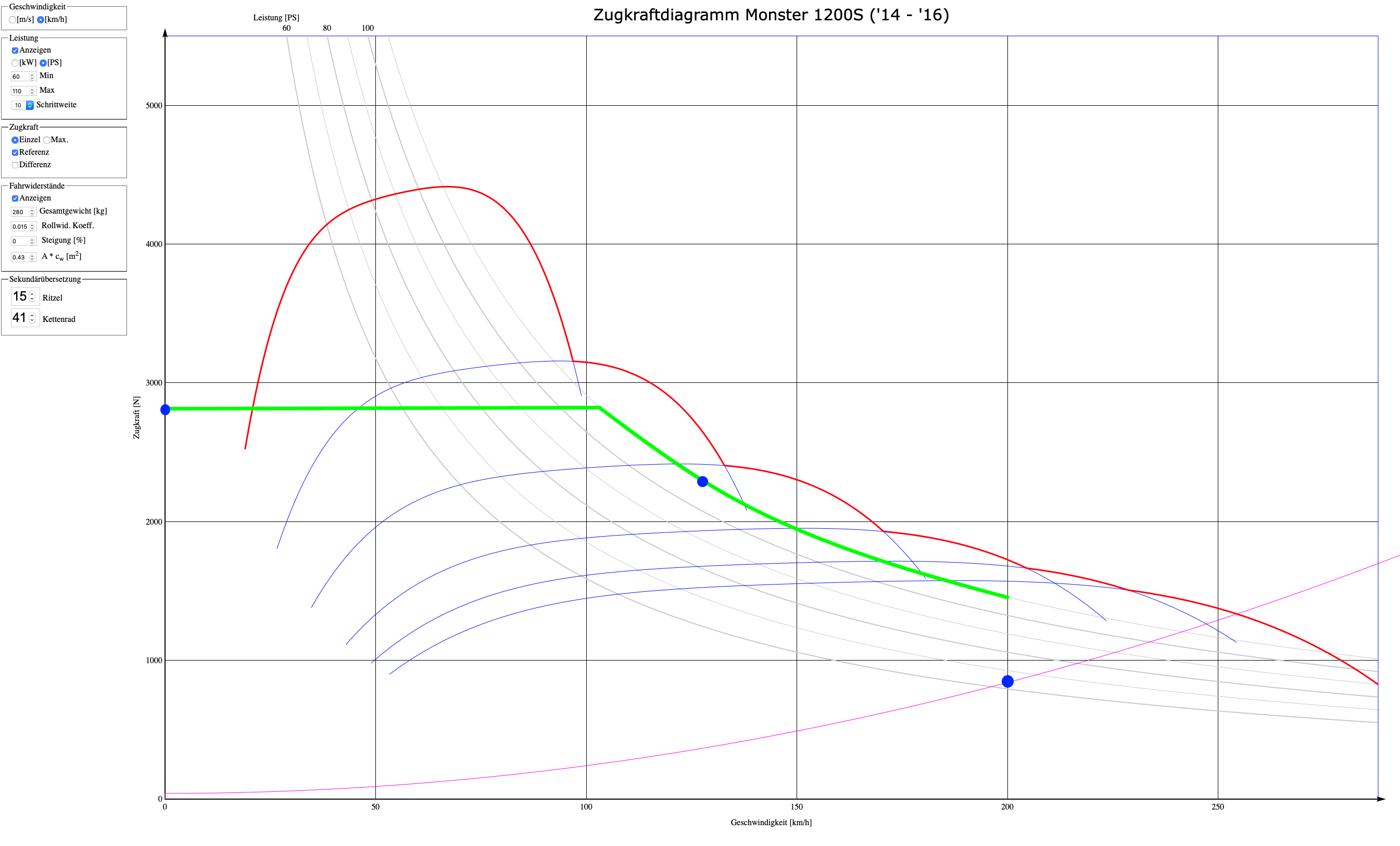
Die unzweifelhaften drei Punkte, die vom Anbieter eingeräumt (a.k.a.: «beworben») werden, bzw. aus physikalischen Gesetzmäßigkeiten folgen, sind oben blau markiert. In der Reihenfolge aufsteigender Geschwindigkeit (von links nach rechts):
- Das maximale Drehmoment von 190 Nm in Stand, entsprechend etwa 2’800 N Zugkraft am Hinterrad.
- Die (kurzzeitig abrufbare) maximale Leistung von 110 PS bei 5’000 U/min, die sich auf eine Fahrgeschwindigkeit von ca. 128 km/h übersetzen lässt.
- Und schließlich: die Höchstgeschwindigkeit von 200 km/h, die eine Dauerleistung von rund 65 PS (graue Hyperbeln konstanter Leistung) erfordern würde. Also knapp oberhalb der für die Zero angegebenen Dauerleistung von 40 kW. Aber gut: auch eine Ducati fährt man nicht wegen ihrer Höchstgeschwindigkeit.
Damit ergibt sich für die zero ein realistischerer Zugkraftverlauf wie folgt:
Nachdem ich im o.a. Forum den Traum von durch die Zero extra-lang gezogenen Armen hatte platzen lassen, trauten sich einige der notorischen Radaubrüder im Forum wieder aus ihren Löchern und trugen ihr plötzlich wiederentdecktes ökologisches Gewissen zur Schau: wie umweltschädlich doch der Lithium-Abbau sei, wie Brand-gefährlich diese Teufels-Akkus seien, und wie ungeklärt die Entsorgungsfrage. Ein lautloses Bike hätten sie vielleicht noch knurrend geduldet, wenn es denn kräftiger als ihre Ducatis an den Armen gezerrt hätte. Aber so? Geht ja garnicht!
Das war schon köstlich mitanzusehen. Ich habe mich dann still abgewandt.
Für diejenigen, die noch mögen, in aller Kürze ein paar Erläuterungen zum Drehmomentverlauf bei einem Elektromotor:
Die Kraftentwicklung im Elektromotor basiert auf dem Prinzip der magnetischen Anziehung ungleichnamiger Pole, bzw. der magnetischen Abstoßung gleichnamiger Pole.
Der Motor hat einen «Stator» und einen «Rotor». Der Stator steht still, bzw. ist mit dem Rahmen verschraubt, während der Rotor sich dreht. Man unterscheidet zwischen «Innenläufern» und «Aussenläufern». Soll heissen: bei Innenläufern rotiert der innere Teil des Motors, und bei Aussenläufern umschliesst der Rotor den innenliegenden Stator glockenartig.
Bei der Zero ist die Designentscheidung für einen Innenläufer ganz offenkundig dem thermischen Haushalt dieses hochbelasteten Elektromotors geschuldet, denn die Verlustwärme der aussenliegenden Statorspulen kann so über die Kühlrippen des «im Fahrtwind liegenden» Motorgehäuses besser abgeführt werden.

Bildquelle: zeromotorcycles.com
Die gleichnamigen oder ungleichnamigen magnetischen Pole befinden sich jeweils paarweise am Stator und am Rotor. Im vorliegenden Fall ist der innenliegende Rotor mit Permanentmagneten ausgestattet, und der aussenliegende Stator mit Spulen, welche sich bei Stromdurchfluss in Elektromagnete verwandeln.
Und, voilá: wenn man es richtig macht hat man ein paar gleichnamige oder ungleichnamige Magnetpole an Stator und Rotor. Diese bewirken am Rotor ein Drehmoment, weil gleichnamige Pole ihren Abstand voneinander maximieren wollen, und ungleichnamige Pole ihren Abstand minimieren wollen.
Würde man nun einfach einen Strom an den Spulen einschalten und eingeschaltet lassen, würde sich der Rotor lediglich einen kleinen Winkelbetrag verdrehen und in dieser Lage wie angenagelt verharren. Weil der minimale Abstand zwischen ungleichnamigen Polen erreicht wäre.
Der Motor der Zero SR/F ist bürstenlos. Also benötigt man eine (Winkel-) Lageerkennung des Rotors, sowie eine intelligente Leistungselektronik, welche im richtigen Moment die richtigen Spulen einschaltet und diejenigen, an denen der Rotor sich nahezu vorbei gedreht hat, wieder ausschaltet. So in etwa.
Auch wenn man eine Spannung schlagartig (unten, grün) an eine Spule anlegen kann, steigt die das Magnetfeld erzeugende Stromstärke erst allmählich, innerhalb einer gewissen Zeitspanne entlang einer Exponentialfunktion auf ihren vollen Wert an (Mitte, rot), und benötigt dafür eine gewisse, konstante Zeit, in Millisekunden oder Mikrosekunden gemessen. Diese Zeit ist im Stillstand des Motors reichlich vorhanden. Deswegen entwickelt der Motor im Stillstand sein maximales Drehmoment.

Quelle: https://de.wikipedia.org/wiki/Spule_(Elektrotechnik)#Zu-_und_Abschaltvorgänge_bei_Gleichspannung
Henrik Schumacher [Copyrighted free use]
Mit zunehmender Drehzahl des Rotors wird der magnetisch «interessante» Winkelbereich, in dem der Permanentmagnet des Rotors von einer Spule vorwärts gezogen werden kann, in immer kürzerer Zeit durchlaufen. Dadurch steht eine immer kleinere Zeit für den Aufbau des Magnetfeldes in der stromdurchflossenen Spule zur Verfügung. Der Strom in einer Spule muss bei höheren Drehzahlen bereits abgeschaltet werden, bevor der magnetische Fluss seinen Maximalwert erreicht hat. Anderenfalls würde der Elektromagnet den gerade vorbeigesausten Pol des Permanentmagneten wieder «zurück» ziehen, anstatt ihn vorwärts zu treiben. Die kürzere Zeit reicht irgendwann nicht mehr aus, ein Magnetfeld voller Stärke aufzubauen. Daher das abnehmende Drehmoment bei steigenden Drehzahlen.
Schon blöd, diese Physik.
P.S.: mein Kumpel war übrigens sehr angetan von der Probefahrt mit der Zero, und sieht einer irgendwann kommenden Verbrenner-losen Zukunft nun ein wenig gelassener entgegen. Für das kommende Frühjahr haben wir ein paar Vergleichsfahrten unter kontrollierten Bedingungen vereinbart (GPS-basierter Datenlogger mit 10 Hz Aufzeichnunsrate). 😎