
In meinem vorigen Beitrag hatte ich meinen DC Generator Prüfstand vorgestellt. Inzwischen hatte ich Gelegenheit, diverse Gleichstrommotoren an charakteristischen Positionen des Spektrums möglicher Gleichstrommotoren für Modellbauzwecke zu vermessen, …
… und zwar vorwiegend solche der RS-38* Klasse (ø28 mm), aber auch zwei aus der R*-54* Klasse (ø36 mm).
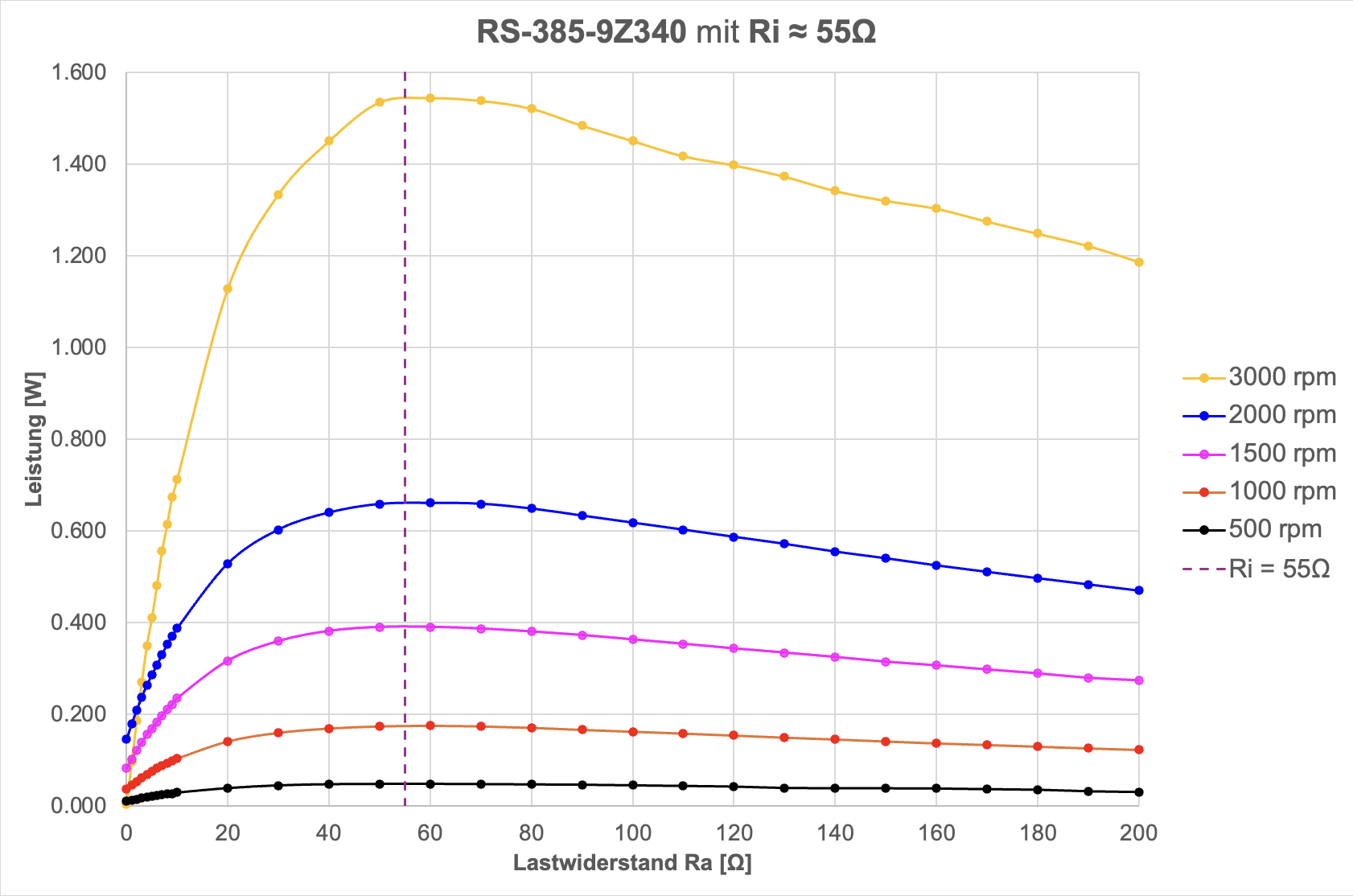
Angefangen hatte ich mit einem Gewirr an viel zu langen und dabei meistens zu dünnen, unterschiedliche Querschnitte aufweisenden Kabeln, sowie teils mit Krokodilklemmen, teils mit Lüsterklemmen und sogar mit schnöden M2 Messingschräubchen zusammengehaltenen Komponenten. Aber dieser halb-fliegende Aufbau hatte bei meinem ersten Prüfling, einem RS-385-9Z340 mit einem Innenwiderstand von rund 55 Ω völlig ausgereicht, ein insgesamt schlüssiges Verständnis der physikalischen Zusammenhänge sowie aussagekräftige Verlaufskurven zu erhalten: ein paar zusätzliche Ohm Widerstand durch zu lange und zu dünne Kabel sowie vermeidbare Übergangswiderstände konnten das grundsätzliche Ergebnis nicht signifikant verfälschen. Als ich später dann an Motoren geriet, die Innenwiderstände von z.T. deutlich unter 1 Ω aufwiesen, habe ich dann doch die Leitungs- und Übergangswiderstände optimiert, durch radikale Verkürzung aller Verbindungsleitungen und Umstellung auf hoch-flexible 12AWG (3.4 mm2) Silikonkabel und Bananenstecker mit Querlochverbindungen:
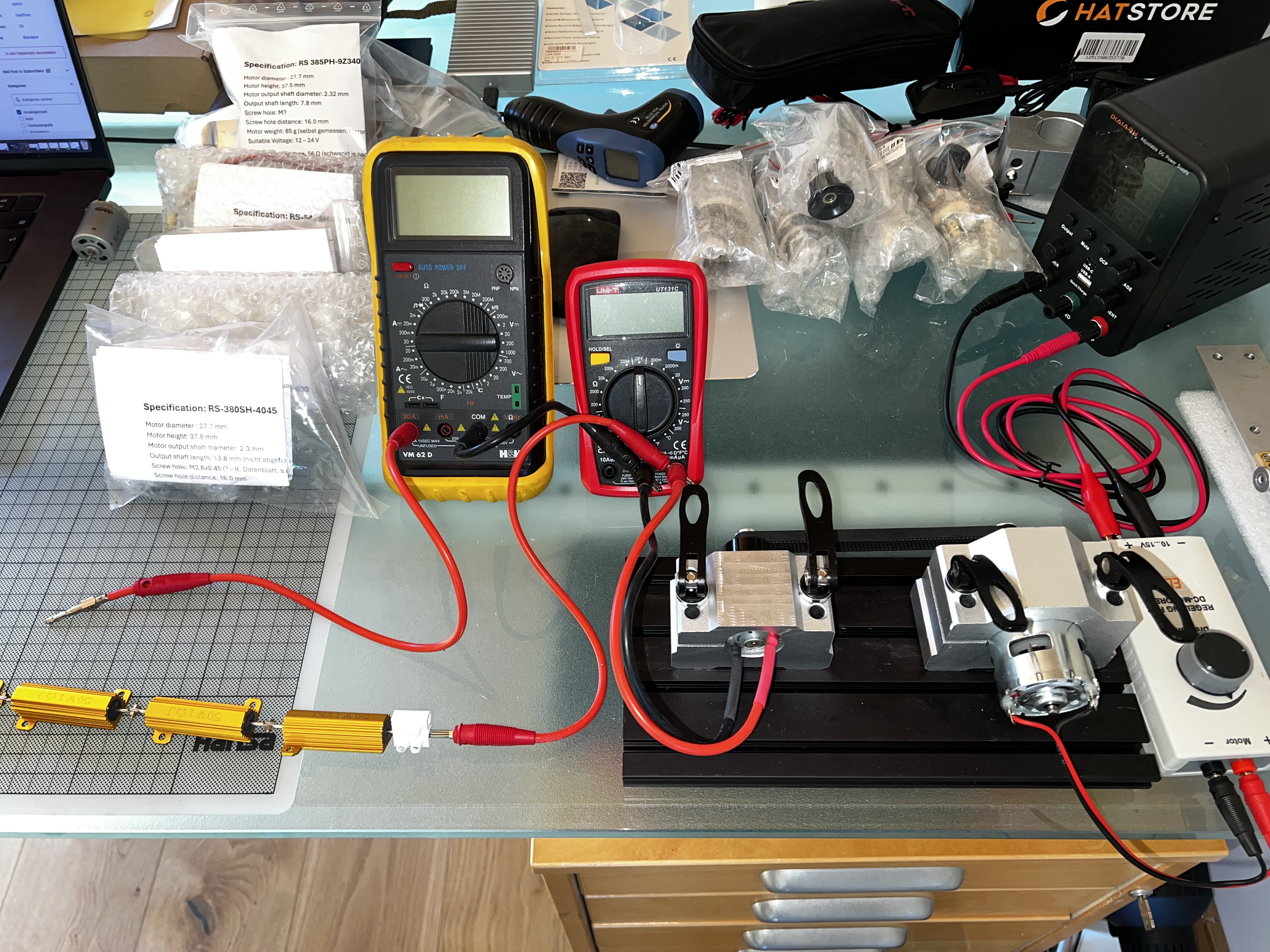
Diese Aufrüstung hatte übrigens wesentlichen Anteil daran, dass ich später beim Vermessen des RS-540SH-7525, welcher das Herz meines «Generator++» bildet, einen Kurzschlussstrom bei 5000 rpm von über 15(!) Ampere messen konnte 😲
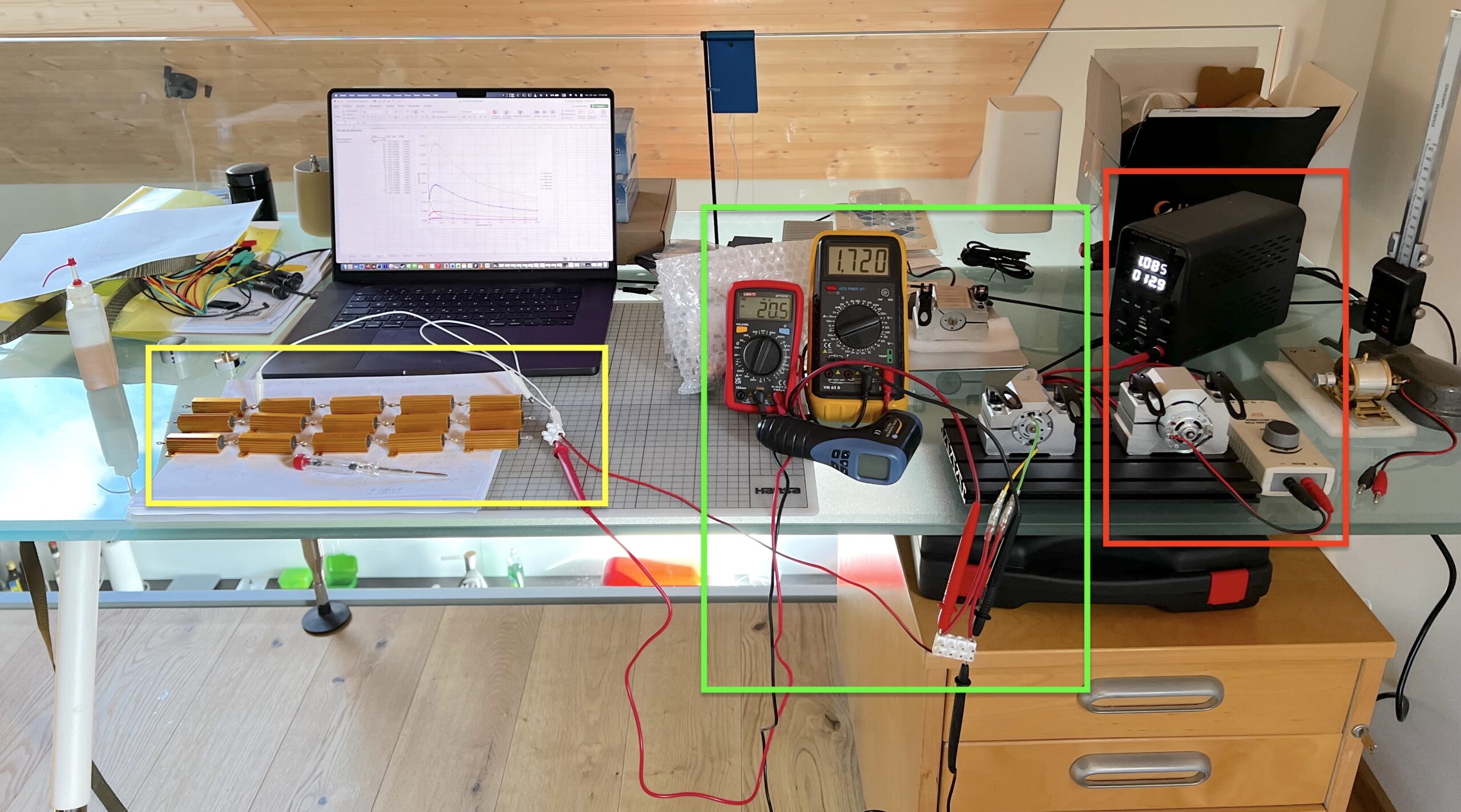
Trotz der scheinbaren Unordnung sind die Protagonisten auf meinem Schreibtisch dennoch strukturiert angeordnet:
- Rot: Stromversorgung, lastunabhängige Drehzahlregelung und Antriebsmotor. Insgesamt ist so ein einstellbarer Konstantdrehzahlantrieb für den zu prüfenden Motor realisiert.
- Grün: Prüfling mit Messtechnik, bestehend aus 2x Multimeter für Strom- und Spannungsmessung, sowie ein PCE-DT 50 für die berührungslose Drehzahlmessung .
- Gelb: drei separate Hochlast (50W) Widerstands-«dekaden» zur kontrollierten Belastung des Prüflings, mit
- 10Ω – 90 Ω in einer Abstufung vom 10Ω
- 1Ω – 9Ω in einer Abstufung vom 1Ω
- 0.1Ω – 0.9Ω in einer Abstufung vom 0.1Ω
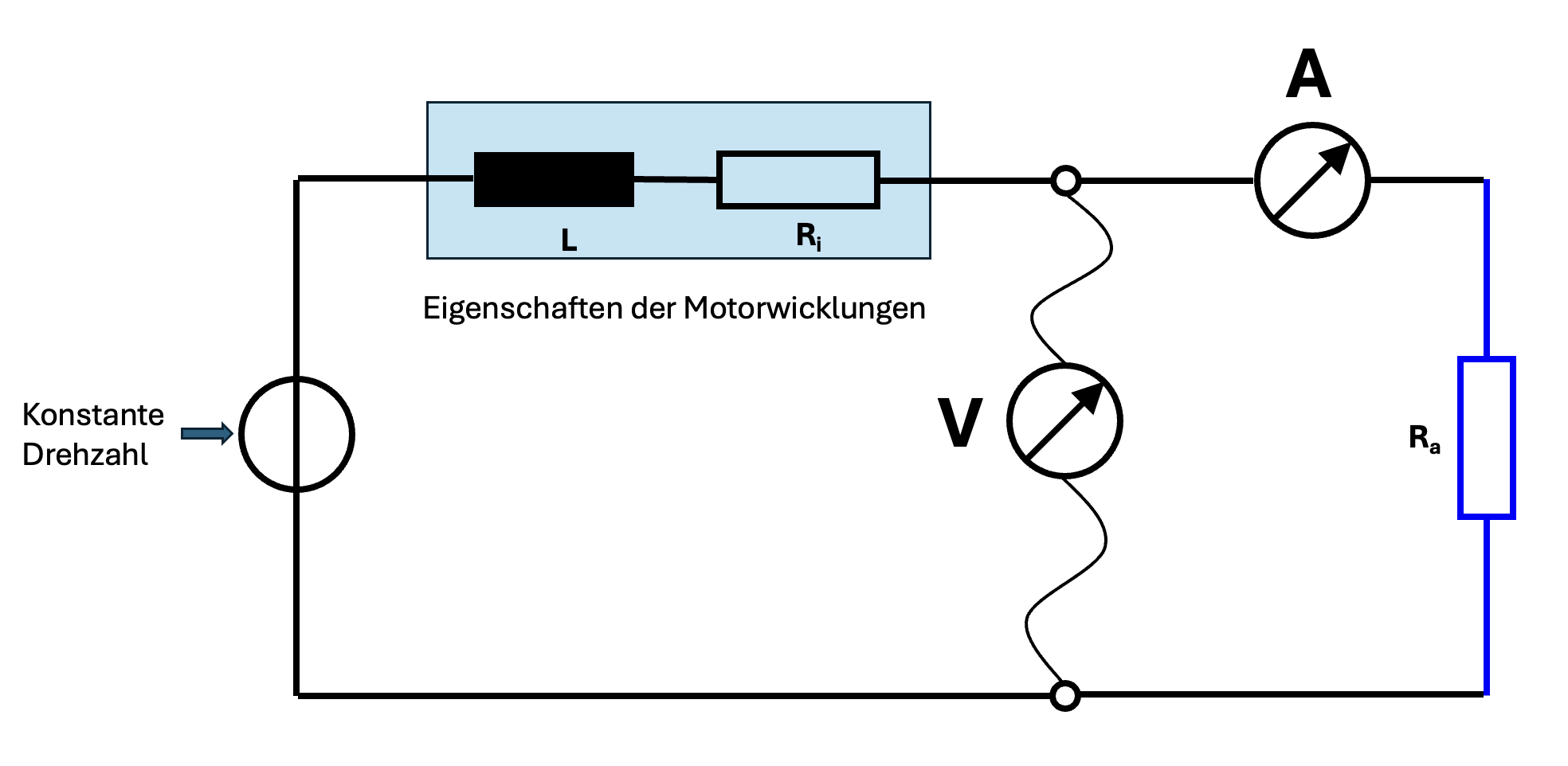
Hier der prinzipielle Messaufbau:
Update 11.05.2026: Inzwischen nutze ich eine dramatisch effizientere und präzisere Methode zur Ermittlung der hier vorgestellten Kurvenverläufe.
Den ganzen Aufwand habe ich betrieben, um die bis dahin offene Frage abschliessend zu beleuchten, ob man (unter ansonsten gleichen Bedingungen) durch den blossen Austausch des im «Generator» Bausatz der Firma Bengs Modellbau verwendeten Gleichstrom Motörchens dessen Leistungsabgabe im Generatorbetrieb verbessern, d.h. erhöhen könne. Im vorliegenden Blogbeitrag erfolgt nun endlich die Auflösung – bitte weiterlesen!
Aus dem obigen, absolut typischen Beispiel eines Messprotokolls lassen sich zwei Hauptaussagen sehr schön ableiten, welche für alle Motorgrössen (38*er und 54*er) und alle Wicklungscharakteristiken (wenige Windungen mit dickem Draht, viele Windungen mit dünnem Draht) gleichermassen gelten:
Drehzahl, Drehzahl, Drehzahl!
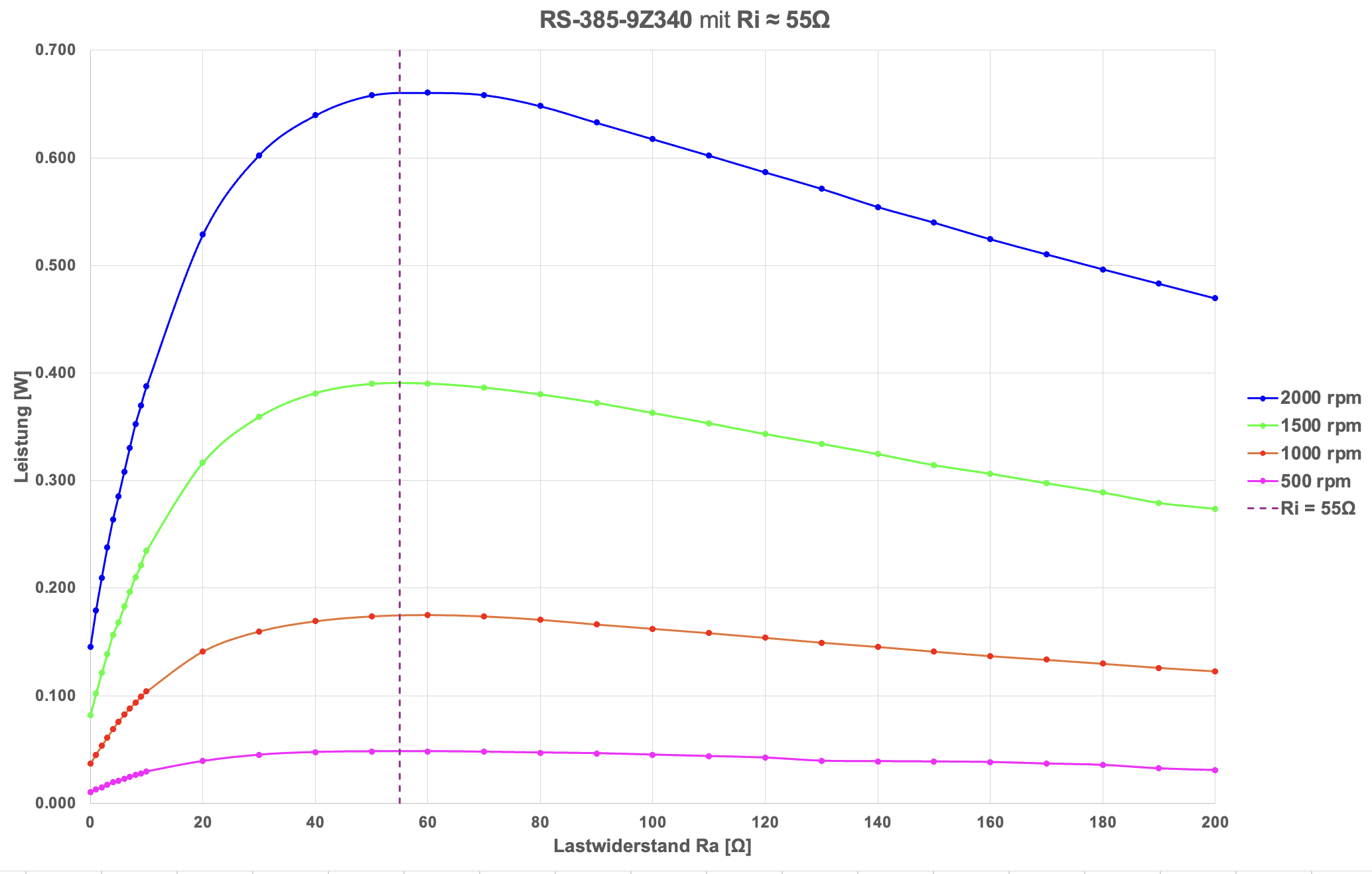
Die Generatorleistung skaliert mit dem Quadrat der Drehzahl, d.h.: doppelte Drehzahl bringt 4-fache Leistung, 4-fache Drehzahl bringt 16-fache Leistung, u.s.w.. Das klingt doch eigentlich nach der Lösung, oder nicht? Leider gilt dieser Zusammenhang auch in der für uns ungünstigen Richtung: halbe Drehzahl reduziert die Generatorleistung auf ein Viertel, bei einem Viertel der ursprünglichen Drehzahl reduziert sich die ursprüngliche Leistung auf ein Sechzehntel … 😢
Unsere aus Bausätzen selbstgefertigten Modellmaschinen sind mit Drehzahlen zwischen ca. 200 UpM und maximal 1500 UpM (Angaben lt. Produktbeschreibungen auf den Webseiten von Bengs Modellbau) ausgesprochene Langsamläufer. Da Stirlingmotoren und Flammenfresser prinzipbedingt «schwache» Maschinen sind, die so wenig überschüssige Kraft aufbringen dass die Ausstattung mit Riemenscheiben in den entsprechenden Bausätzen nirgends(!) vorgesehen ist, verbietet sich auch eine Übersetzung der zu niedrigen Maschinendrehzahl auf eine höhere Generatordrehzahl. Denn eine Drehzahlerhöhung beim Generator setzt zwingend eine höhere Drehmomentbelastung einer ohnehin bereits zu schwachen Antriebsmaschine voraus. Dabei muss man wissen, dass jegliche Leistungsentnahme über den Generator den Antriebsmotor bremst: je mehr, desto mehr. Nutzbares Potenzial als Antriebsmaschine des «Generator» sehe ich daher nur bei der Gruppe der Verbrennungsmotoren, evtl. noch bei grossvolumigen oder mehrzylindrigen Dampfmaschinen.
Leistungsanpassung!
Im vorstehenden Diagramm kann man ebenfalls erkennen, dass die für jede Drehzahl abrufbare elektrische Generatorleistung maximal wird, wenn der Aussenwiderstand gleich dem (ohmschen) Innenwiderstand der Motorwicklung ist, im Diagramm durch eine senkrechte gestrichelte Linie markiert. Dieser Zusammenhang wird in der Elektrotechnik Leistungsanpassung genannt.
- Wenn
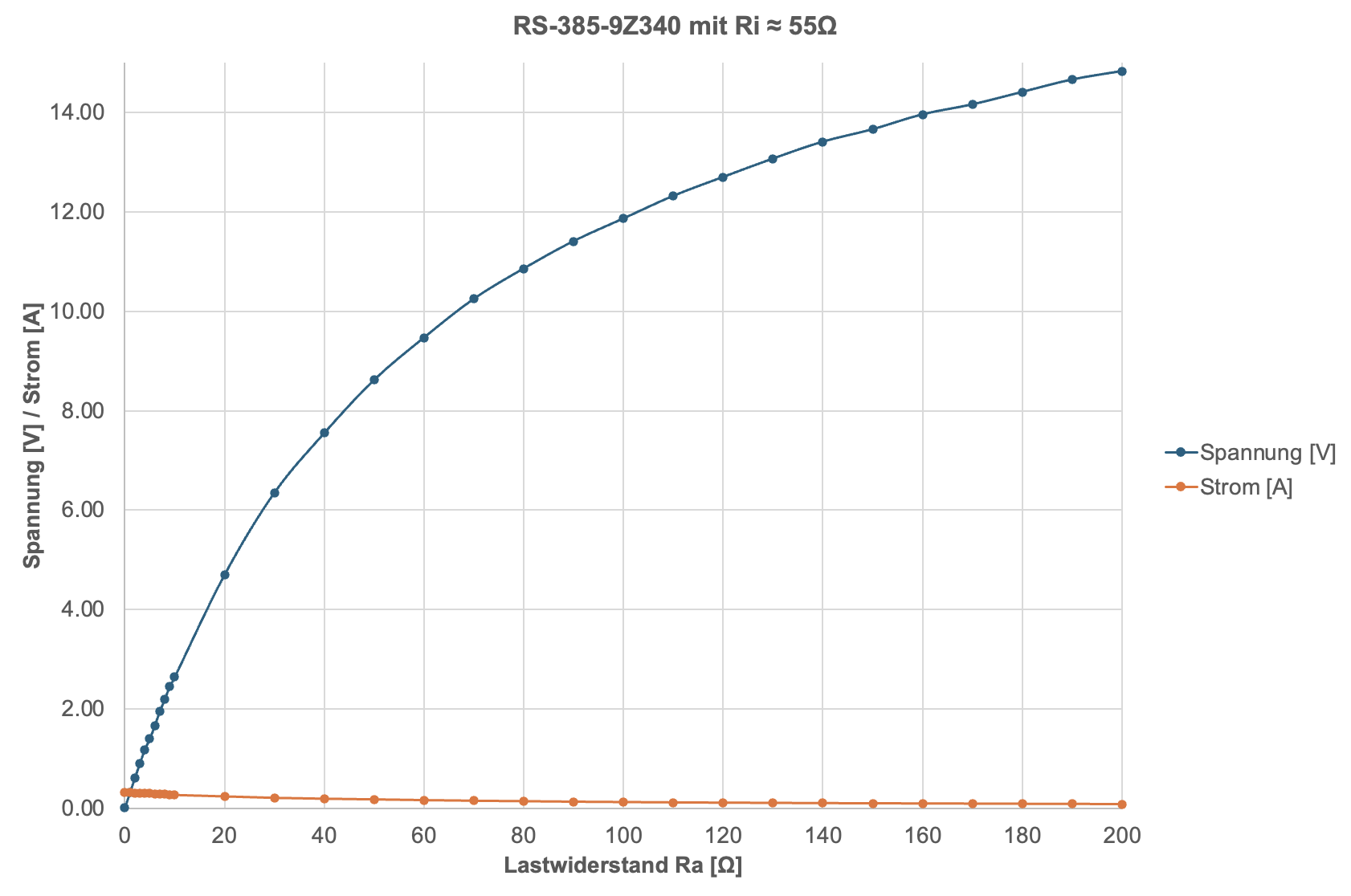
, (Anm. d. Autors: der Kurzschlussfall) dann bricht die Klemmenspannung nahezu zusammen, die Leistung am Außenwiderstand wird gering, die erzeugte Leistung wird fast vollständig am Innenwiderstand in Wärme umgewandelt.
- Wenn
, dann kommt fast kein Strom mehr zustande, was ebenfalls zu einer geringen Leistung am Außenwiderstand führt.
Dazwischen liegt ein Maximum der Leistungsabgabe vor bei der sogenannten Widerstandsanpassung.
Quelle: Wikipedia
Auswahl der Prüflinge
Ich hatte in einem früheren Beitrag eine Excel-Tabelle mit den Daten der leicht erhältlichen ø 28 mm Gleichstrommotoren der RS-38* Klasse bereitgestellt, welche identische Gehäuseabmessungen aufweisen, sich jedoch im «Innenleben», den Wicklungsdaten erheblich unterscheiden. Aus dieser Liste habe ich die beiden extremen Kandidaten mit maximalen und minimalen Windungszahlen, sowie einen «mittleren» Kandidaten ausgesucht und bestellt. Dabei handelt es sich um die folgenden drei Motoren:
- RS-385SH-4516, mit 5-poligem Anker und 16 Windungen eines Drahts mit ø 0.45 mm (inkl. Isolierlack!).
- RS-385SH-2270, mit 5-poligem Anker und 70 Windungen eines Drahts mit ø 0.22 mm (inkl. Isolierlack!). Dieser Motor dürfte am dichtesten an den serienmässig dem «Generator» Bausatz beiligenden herankommen, den ich durch Abwickeln einer Wicklung als kompatibel zu einem RS-385**-2173 identifizieren konnte.
- RS-385SH-9Z340, mit 5-poligem Anker und 340 Windungen eines Drahts mit ø 0.095 mm (inkl. Isolierlack!).
Hinweis: den ursprünglich hier als Vertreter eines «dickdrahtigen» Motors mit wenigen Windungen vorgestellten RS-380-4045 habe ich wegen der nicht gegebenen Vergleichbarkeit als 3-poliger Motor mit den beiden anderen, jeweils 5-poligen Motoren ersetzt durch einen RS-385-4516. Dieser weist bei 5 Polen einen noch dickeren Drahtdurchmesser und noch weniger Windungen auf, und ist folglich noch besser geeignet um die Einflüsse von Draht-ø und Windungszahl zu demonstrieren.
Als «Nachzügler» profitiert der RS-385-4516 bereits von meiner neuen, präziseren und effizienteren Vermessungs- und Berechnungsmethode.
Bei den grösseren ø36 mm Motoren der RS-54* Klasse, welche man mit Klimmzügen ebenfalls im «Generator» Bausatz unterbringen könnte, habe ich mich für die folgenden beiden Prüflinge entschieden:
- RS-540SH-7525, mit 3-poligem Anker und 25 Windungen eines Drahts mit ø 0.75 mm, den ich auch in meinem Generator++ verwende
- RF-545-20122, mit 5-poligem Anker und 122 Windungen eines Drahts mit ø 0.20 mm. Dies ist übrigens einer der von mir als «Geheimtip» empfohlenen Motoren, welche für Vibrationsanwendungen beworben werden und eine auffallend niedrige Leerlaufdrehzahl in Verbindung mit für Modellbauer erfreulich langen Wellenstummeln aufweisen.
Die Rolle der Induktivität
Im Ersatzschaltbild der Messanordnung meines Prüfstands (s.o.) hatte ich als zusätzliche Eigenschaft der Ankerwicklung des Gleichstrommotors eine Induktivität «L» eingezeichnet. Jeder Ankerpol des Rotors eines permanent-erregten Gleichstrommotors ist mit mehreren Windungen eines Kupferdrahts umwickelt, welche eine Spule bilden. Diese Spule weist eine Induktivität auf, wobei die Windungszahl quadratisch in die Berechnung der Induktivität eingeht. Jede Induktivität hemmt die plötzliche Änderung eines Stromflusses durch diese Spule, und zwar je grösser die Induktivität, umso grösser die hemmende Wirkung. Dies dürfte die Ursache für die beobachteten geringen Leerlaufdrehzahlen von Motoren mit hoher Windungszahl sein.
Innenwiderstand
Ich hatte auch die zentrale Rolle des Innenwiderstands eines Gleichstrommotors bei der Leistungsanpassung erwähnt. Der Innenwiderstand wird massgeblich durch den ohmschen Widerstand des aufgewickelten Kupferdrahts der Ankerwicklung hervorgerufen. Dazu kommen Zuschläge wegen der Kohlebürsten und deren Zuleitungen, sowie Übergangswiderstände.
Die Ermittlung des Innenwiderstands eines Gleichstrommotors ist nicht ganz trivial, weil er häufig sehr klein ist, z.T. < 1 Ω, und haushaltsübliche Multimeter bei derart kleinen Widerständen erhebliche(!) Ungenauigkeiten im oberen zweistelligen Prozentbereich und mehr(!) aufweisen können. Meine Angaben sind insofern mit Vorsicht zu geniessen! Ich habe die folgende Methode angewandt, um trotzdem zu einem ungefähren Ergebnis zu gelangen:
Den Motor mit einer kleinen(!), stabilisierten Spannung von z.B. 1.00 Volt beaufschlagen und dabei blockieren. Der Quotient aus der kleinen, stabilisierten Spannung von 1.00 V und dem dabei gemessenen Stromfluss [A] ergibt den Innenwiderstand [Ω]. Den Rotor des Prüflings bei dieser Messung mehrfach um kleine Winkelbeträge verdrehen und einen Mittelwert der resultierenden Stromstärke für die Widerstandsberechnung verwenden.
Für meine oben genannten Prüflinge habe ich mit dieser Methode Erwartungswerte zwischen ≈ 55 Ω und ≈ 0.16 Ω ermittelt. Man kann natürlich auch die Leistungsabgabe des Generators bei veränderlichem Lastwiderstand aufzeichnen und als Innenwiderstand auf denjenigen Lastwiderstand schliessen, bei dem die Kurve ihr Maximum aufweist (siehe meine Ausführungen zur Leistungsanpassung).
Messwerte für die getesteten RS-38* Motoren
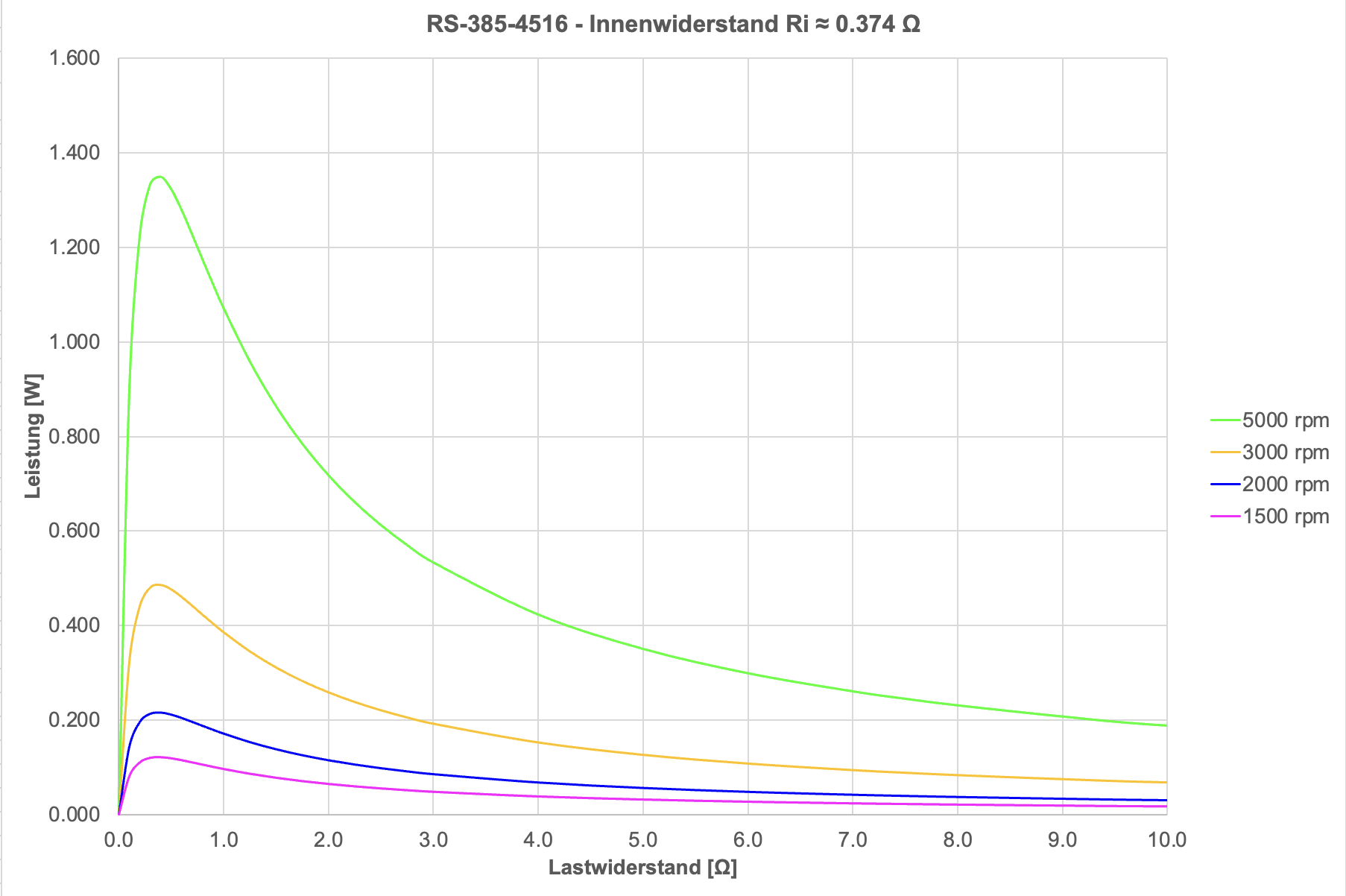
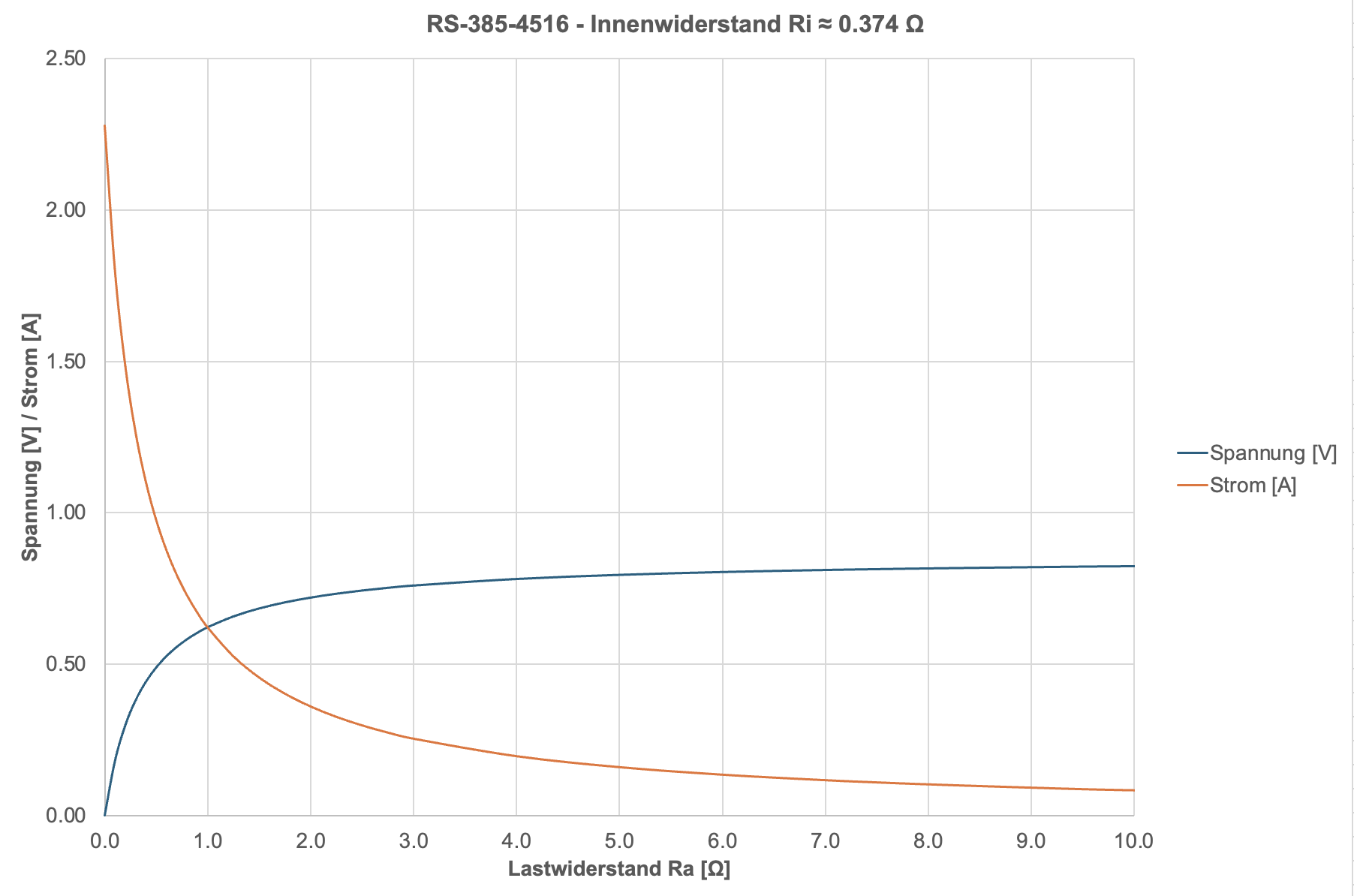
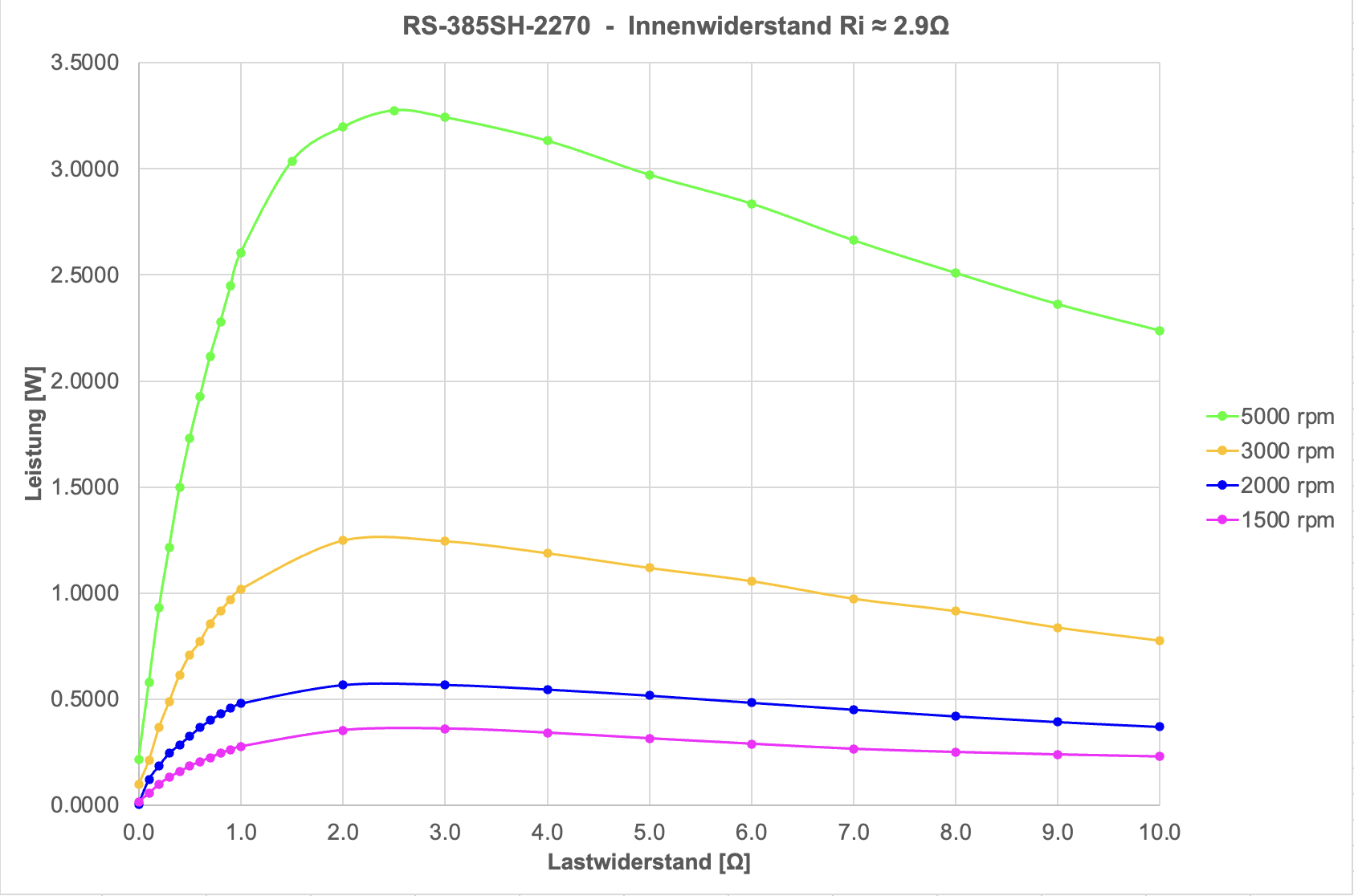
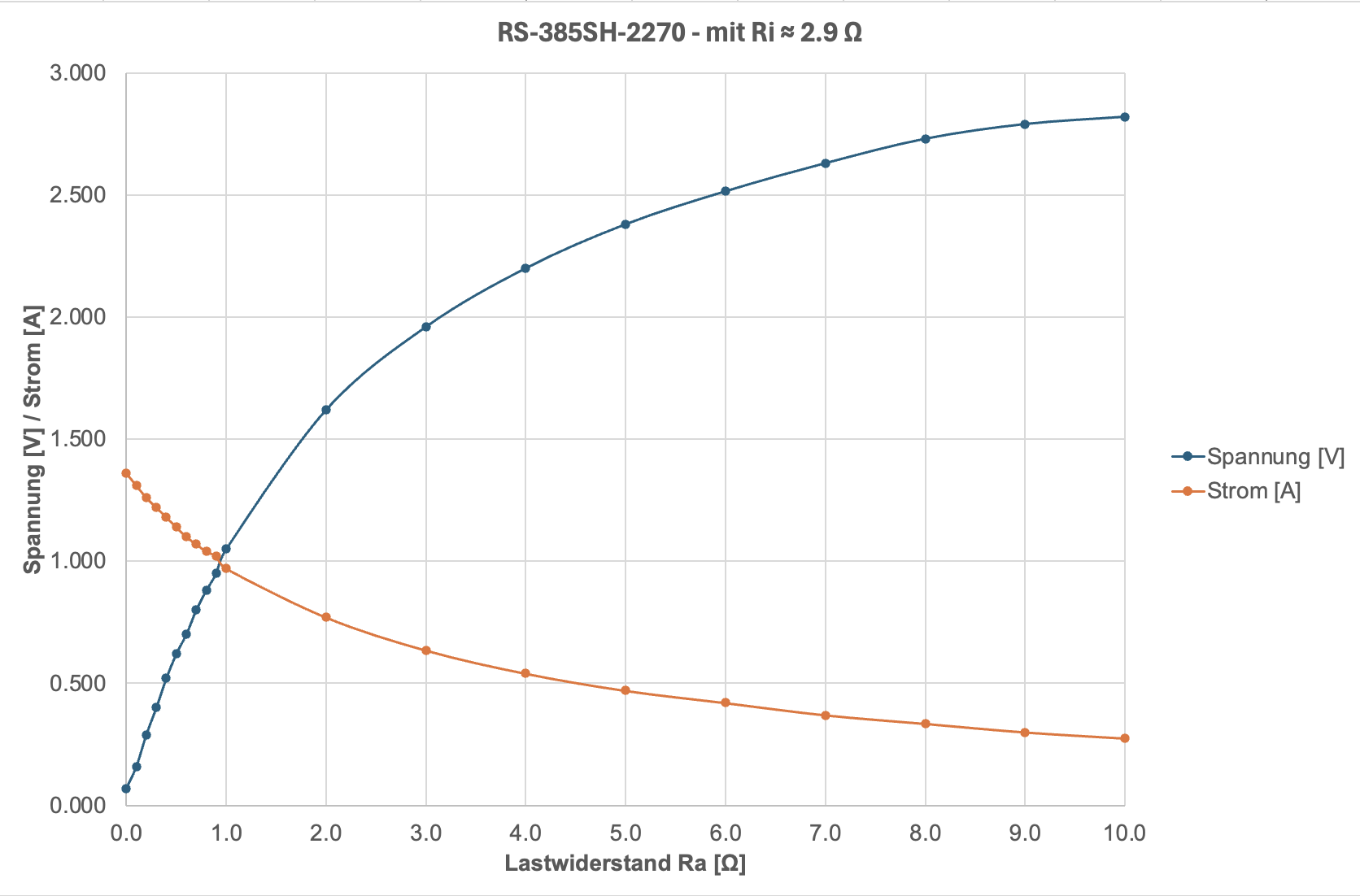
Bitte die unterschiedlichen Achs-Massstäbe beachten!
Messwerte für die getesteten RS-54* Motoren
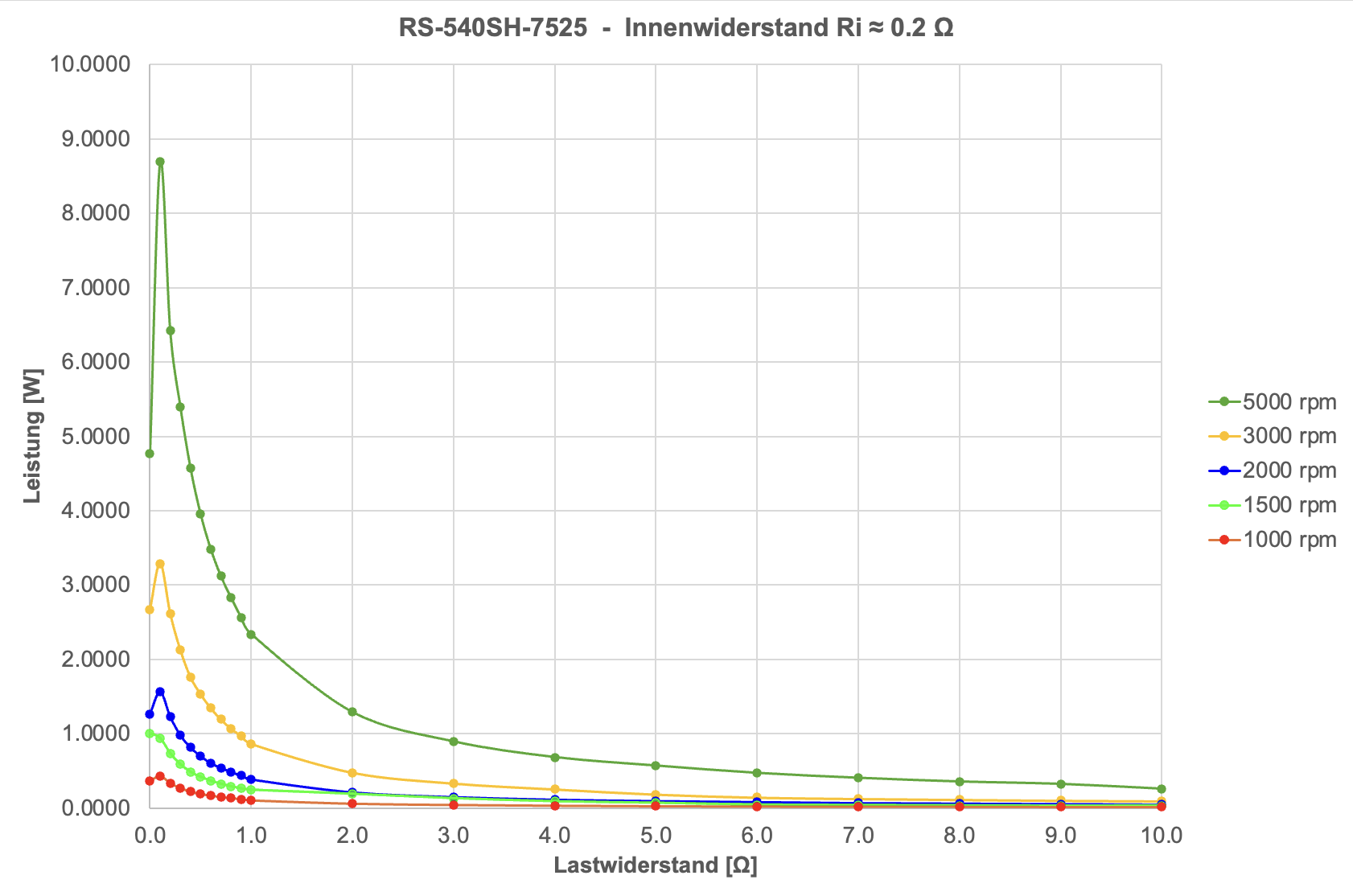
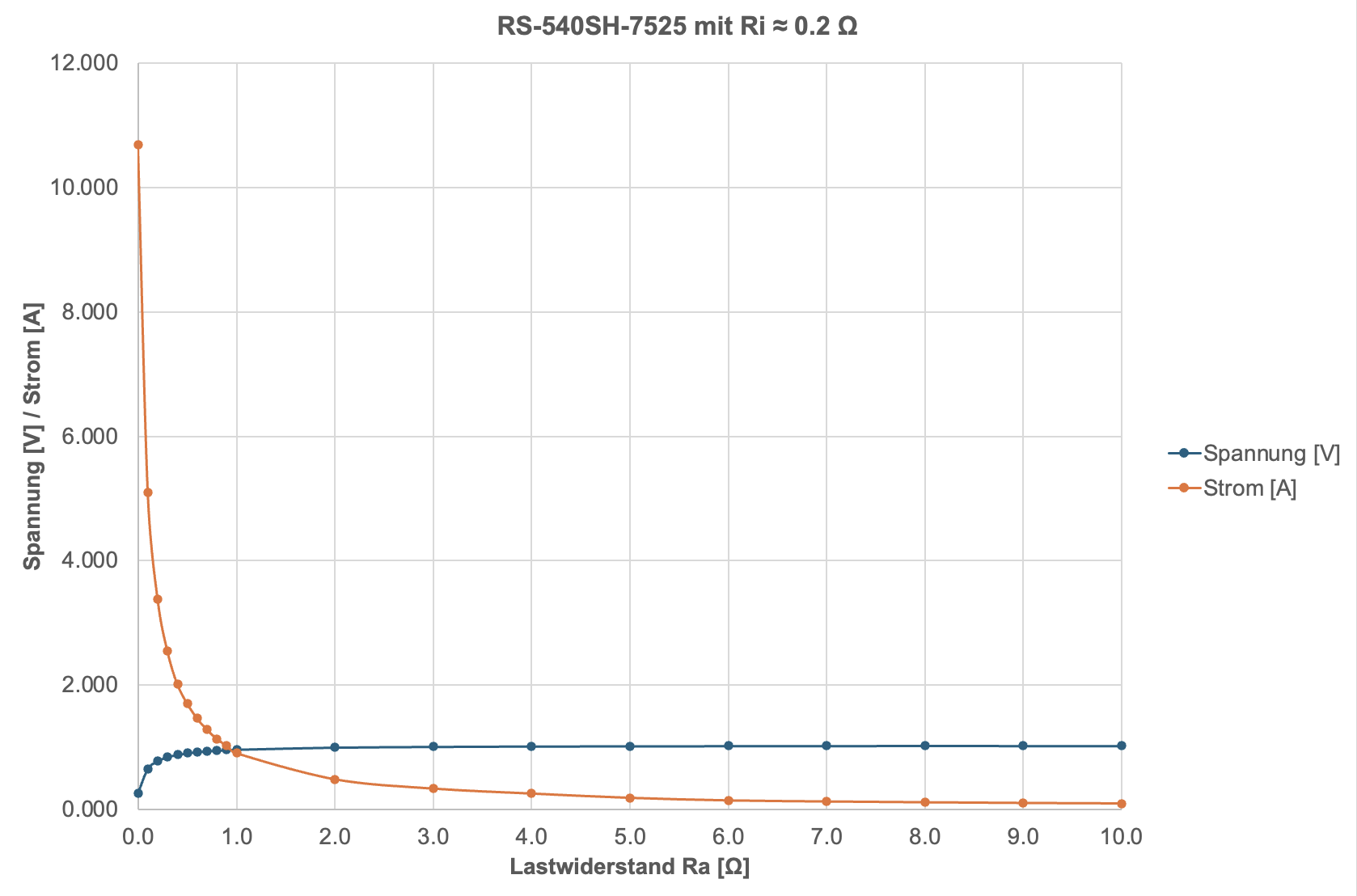
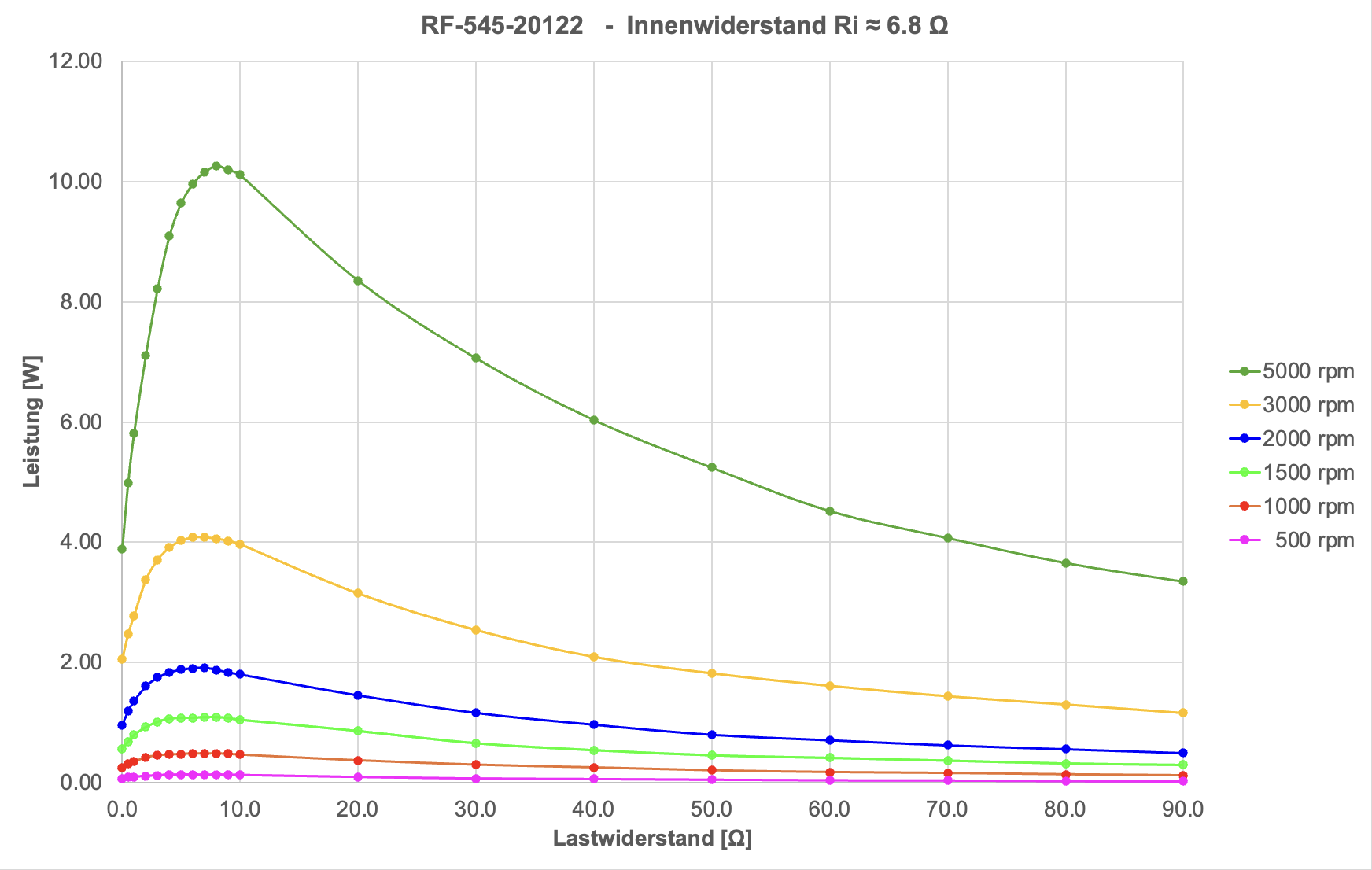
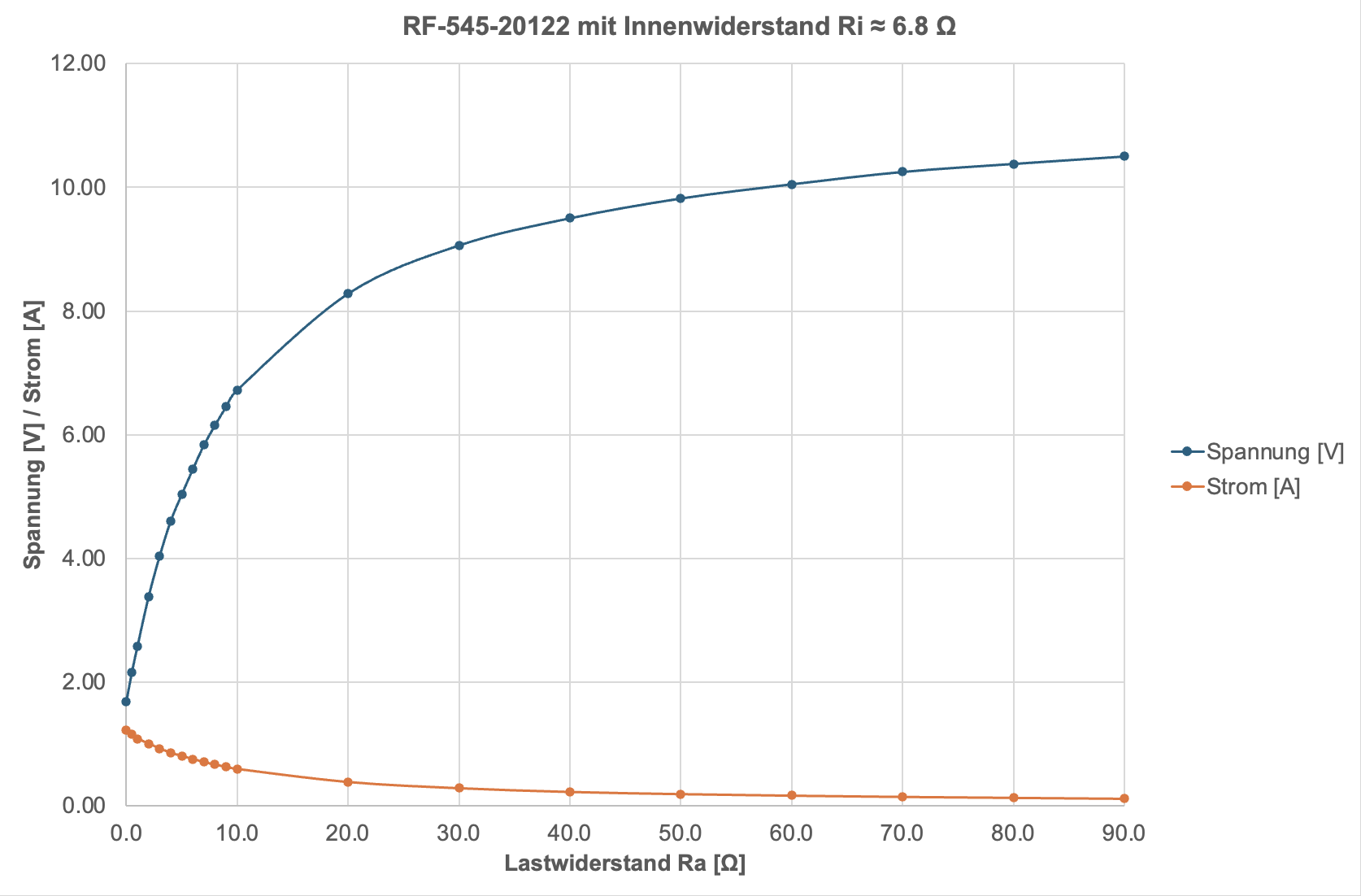
Bitte die unterschiedlichen Achs-Massstäbe beachten!
Diskussion
Mir ist aufgefallen, dass wir es im vorliegenden Zusammenhang mit drei massgeblichen Grössen zu tun haben, die sich sämtlich als Produkt zweier Einflussfaktoren darstellen lassen:
- Elektrische Generatorleistung «P», als Produkt von Spannung «U» und Stromstärke «I»,
- Mechanische Antriebsleistung «P», als Produkt von Drehmoment «M» und Winkelgeschwindigkeit «ω», welche sich aus der Drehzahl «n» ableitet,
- Kupferquerschnitt in einer Ankernut, welcher sich näherungsweise als Produkt aus Drahtquerschnitt (aus dem Draht-ø ableitbar) mal Windungszahl abschätzen lässt.
Der mathematische Zusammenhang, welcher einen konstanten Wert als Produkt zweier variabler Faktoren darstellt, nennt sich Hyperbel. Für die elektrische Generatorleistung sieht der z.B. so aus:
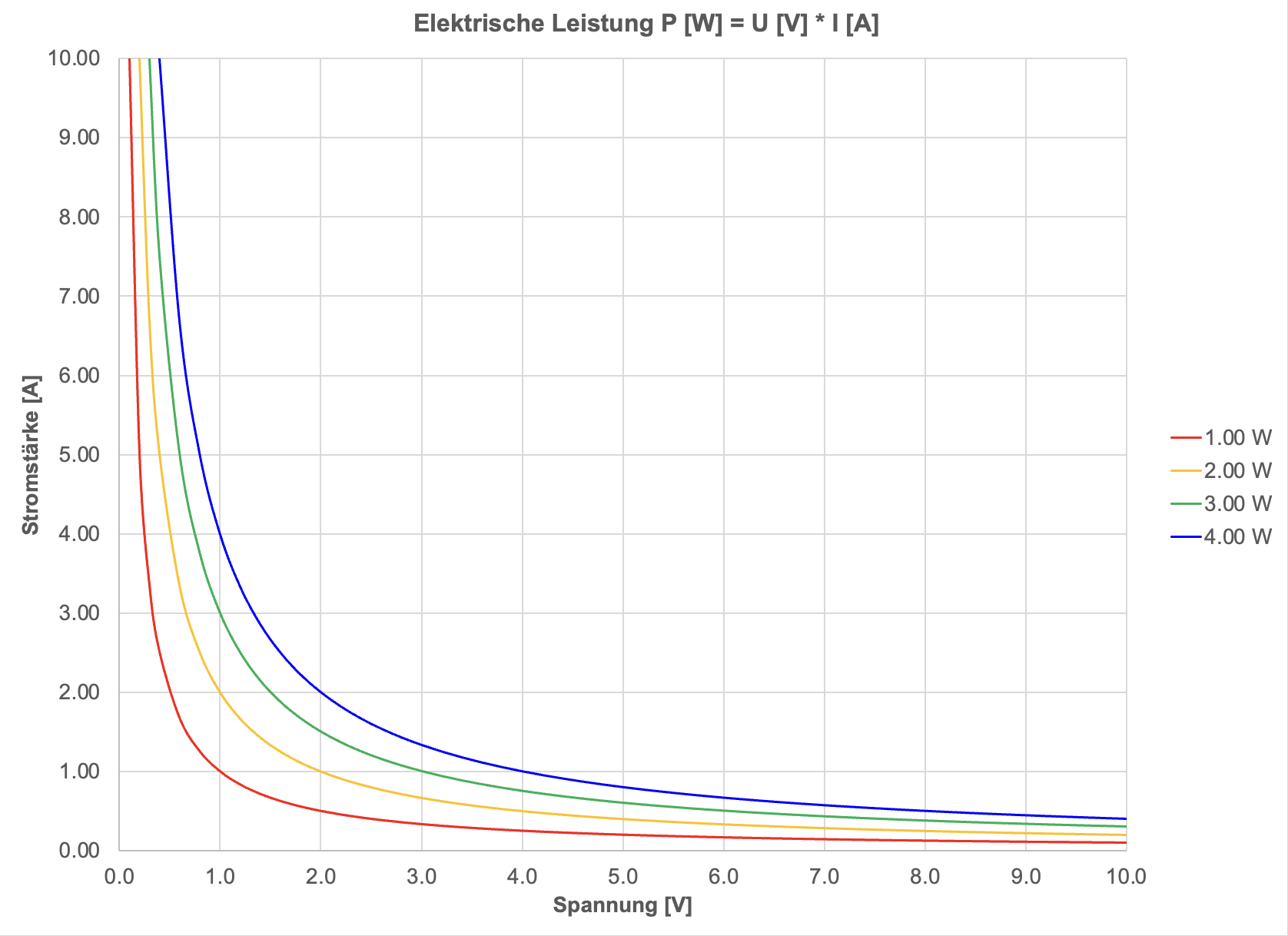
Für jeden Punkt auf einer der obigen Kurven gilt, das dass Produkt der jeweiligen X-Koordinate (hier: Spannung) und y-Koordinate (hier: Stromstärke) gleich der angegebenen elektrischen Leistung ist. Punkte links-unterhalb einer Kurve markieren Spannungs/Stromstärke Kombinationen, die eine kleinere Leistung ergeben. Punkte rechts-oberhalb der Kurve markieren Spannungs/Stromstärke Kombinationen, die eine höhere Leistung ergeben.
Die gleichen Zusammenhänge gelten für die mechanische Antriebsleistung [W] als Produkt aus Antriebsmoment [Nm] und Winkelgeschindigkeit [1/s]. Man kann hier festhalten, dass die Stromstärke mit der Winkelgeschwindigkeit (folgt aus der Drehzahl) korreliert, und die Spannung mit dem Drehmoment.
Entsprechend lässt sich festhalten, dass die Windungszahl einer Wicklung mit dem Drehmoment korreliert, und der Drahtdurchmesser mit der Winkelgeschwindigkeit (Drehzahl). Korrelieren bedeutet in diesem Zusammenhang einen «je mehr, desto mehr» Zusammenhang.
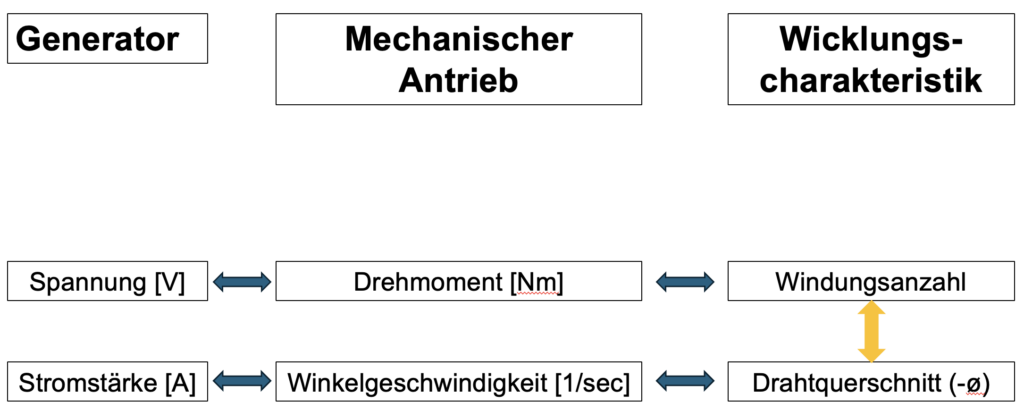
Wenn man davon ausgeht, dass Anbieter von Gleichstrom Elektromotoren bestrebt sind, den «Formfaktor», der durch Durchmesser des Motorgehäuses und Gehäuselänge vorgegeben ist, bestmöglich auszunutzen, so folgt daraus, dass die Wicklungscharakteristik ein möglichst maximales Produkt aus Windungszahl und Drahtquerschnitt erfordert. Da der Luftraum in der Nut eines Ankers je nach Polzahl und Motor (bzw. Anker) -ø hart begrenzt ist, erreicht man eine Maximierung nur durch eine möglichst vollständige Ausfüllung des Luftraums. (Was übrigens nicht ausschliesst, dass Anbieter den vorhandenen Freiraum nicht vollständig ausnutzen). Man kann aber aus Platzgründen nicht gleichzeitig Windungszahl und Drahtdurchmesser maximieren. Eines geht immer auf Kosten des Anderen. Dies soll der gelbe Pfeil in der obigen Illustration verdeutlichen.
Empfehlung für Modellbauer
Da ich diesen sehr aufwendigen Blogbeitrag geschrieben habe um die Frage zu beleuchten, wie man dem «Generator» von Modellbau Bengs mehr Leistung entlocken könnte, möchte ich mich nicht davor drücken, mich mit entsprechenden Empfehlungen an meine Modellbauer-Kollegen «aus dem Fenster zu lehnen»:
Zunächst die schlechte Nachricht: es existiert keine «silver bullet» oder «eierlegende Wollmilchsau», d.h., es gibt keinen «idealen» Motor welcher für alle Anwendungsfälle optimale Ergebnisse liefern würde. 😢 Von allen sechs vermessenen Motortypen kam alleine mein «Geheimtip» RF-545-20122 bei 2000 UpM mit gemessenen 1.91 Watt knapp an die 2 Watt Schwelle heran. Alle übrigen Kandidaten haben bei 2000 UpM diese Marke mit grossem Abstand verfehlt!
Aber die Lage ist nicht hoffnungslos!
Ich sehe drei Schienen, auf denen man einzeln oder in Kombination eine Verbesserung der elektrischen Ausgabeleistung des «Generator» erreichen kann:
- Der Königsweg führt zweifellos über eine Erhöhung der Drehzahl des Generators. Die abgegebene Leistung des Generators skaliert quadratisch mit dessen Drehzahl. Über die Drehzahl nimmt man Einfluss auf das Maximum der Leistungskurve. Leider dürften einer nennenswerten Erhöhung der Drehzahl klassischer Modellbau Antriebsmaschinen des «Generator» technologische Grenzen gesetzt sein (u.a. Qualität der Lagerung, Schmierungsfragen, Festigkeit der beteiligten Bauteile, suboptimale Drosselquerschnitte etc.).
- An zweiter Stelle sehe ich im Rahmen einer Leistungsanpassung eine Angleichung des Innenwiderstands des Generators an den beabsichtigten Lastfall. Wenn der Lastfall unveränderlich ist (Lastwiderstand Ra = konst.), dann kann eine Angleichung des Generator-Innenwiderstands durch Motortausch in Richtung Ri = Ra eine signifikante Verbesserung bewirken. Hierbei kann man sich auf die Information abstützen, dass der ohmsche (Innen-)Widerstand eines Gleichstrommotors proportional zur Länge des Kupferdrahts je Wicklung ist (also der Windungszahl), und umgekehrt proportional zu dessen Drahtquerschnitt. Als Referenz: für den Elektromotor, den Herr Bengs seinem «Generator» Bausatz beilegt, habe ich einen Drahtdurchmesser von 0.21 mm und 73 Windungen ermittelt. Für die ganz Unerschrockenen 🤓💪: lässt sich ein vorhandener Anker auch durch «Umwickeln» mit Draht eines anderen Draht-ø und angepasster Windungszahl besser an einen vorhandenen Lastfall anpassen. (Unter «Umwickeln» ist hier die Entfernung der bisherigen Wicklung und anschliessendes Neuwickeln mit anderem Draht-ø und anderer Windungszahl zu verstehen.)
- Falls man die Generatordrehzahl nicht steigern kann und auch nicht den Motor tauschen oder neu wickeln möchte um dessen Innenwiderstand an den Aussenwiderstand des Lastfalls anzugleichen, so besteht ein (IMO) sehr intelligenter und absolut kostengünstiger Weg bei der Erhöhung des Generator-Outputs (im Zuge einer Leistungsanpassung) in der Gestaltung(!) des Lastfalls! Angenommen, man möchte 50 Standard LED mit Energie aus dem Generator in voller Intensität betreiben. Dann macht es offensichtlich einen Unterschied, ob man diese LED in Reihe schaltet (was eine hohe Spannung bei niedrigen 20 mA erfordern würde, oder ob man sie parallel schaltet und hierbei die 50-fache Stromstärke (1000 mA) bei geringer Spannung erforderlich wäre. Denkbar wären in so einem Fall natürlich ebenfalls Kombinationen aus Serien- und Parallelschaltung, wie z.B. 25S2P, 1oS5P, 7S7P, 5S10P etc.. Ich denke, das Prinzip wird klar.
Ohne den Einsatz von einem, besser zwei Multimetern für gleichzeitige Strom- und Spannungsmessungen wird man allerdings die benötigte Richtung einer Änderung kaum bestimmen oder den Erfolg einer Massnahme nachträglich überprüfen können.
Weiterführende Links:
https://www.maxongroup.com/de-ch/wissen-und-support/blog/dc-motoren-als-generatoren-15832