
Meine Geduld wurde mit 18 Tagen Lieferzeit arg auf die Probe gestellt, bis die aus China bestellten Komponenten für meinen generischen Motorenprüfstand endlich vollständig bei mir eintrafen. Aber ich finde, das Warten hat sich gelohnt:
Das ist jetzt die verfeinerte und generische Ausführung meines in einem vorigen Beitrags vorgestellten Prototyps, seinerzeit noch hart-codiert als proof of concept.
Die neue Fassung bietet gegenüber dem Prototypen einige Vorteile:
Geometrieunabhängigkeit
So kann ich in meinem Abschnitt des verwendeten GB-15120-b Aluprofils die Position der Klemmvorrichtungen stufenlos und dank Schnellspannern auch werkzeuglos verschieben und ggf. auch gegen Klemmen für andere Motorendurchmesser austauschen.
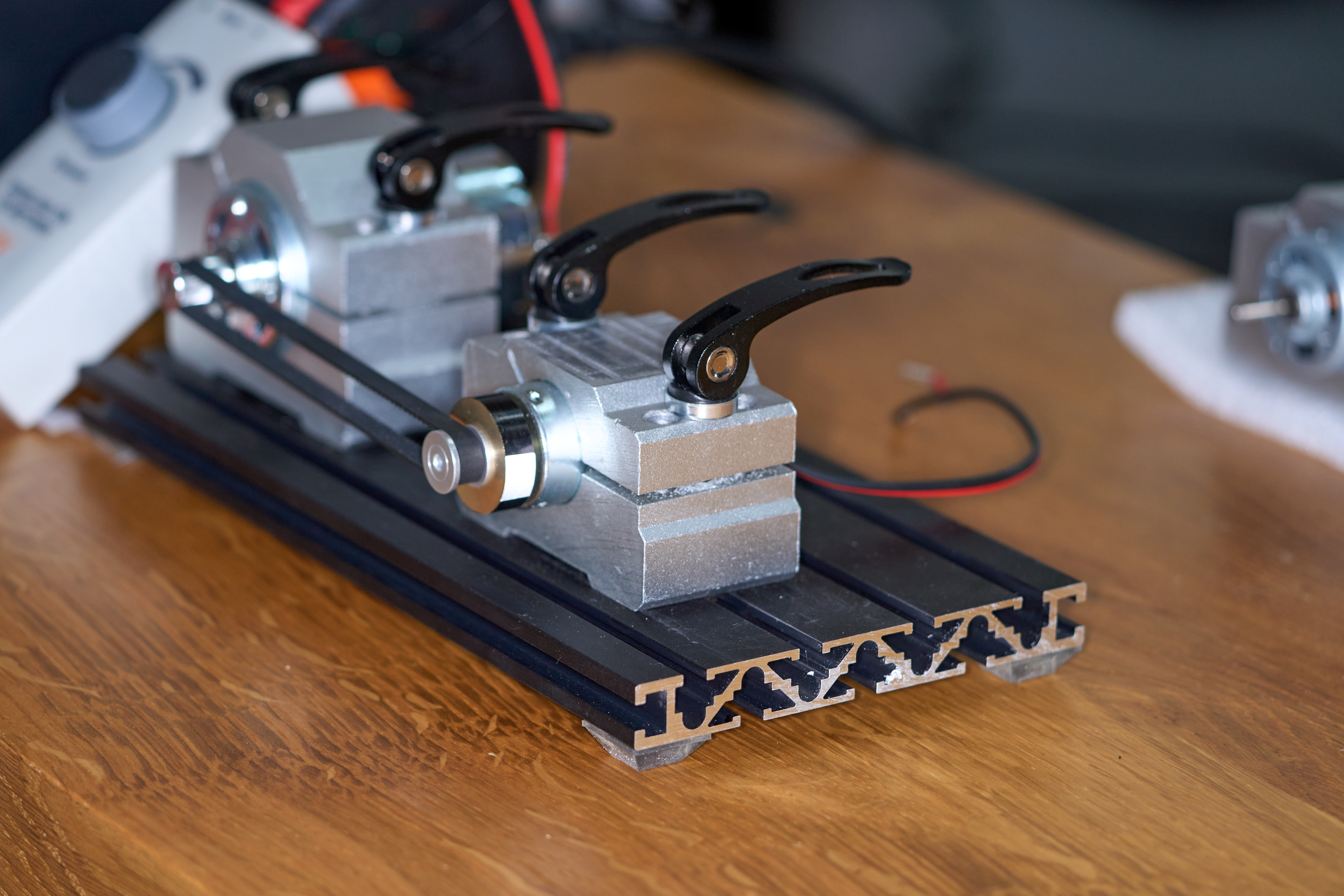
Wenn ich z.B. vom Test eines Motors der R*-3** Klasse (ø28 mm) zum Test eines Motors der R*-5** Klasse (ø36 mm) wechseln möchte.
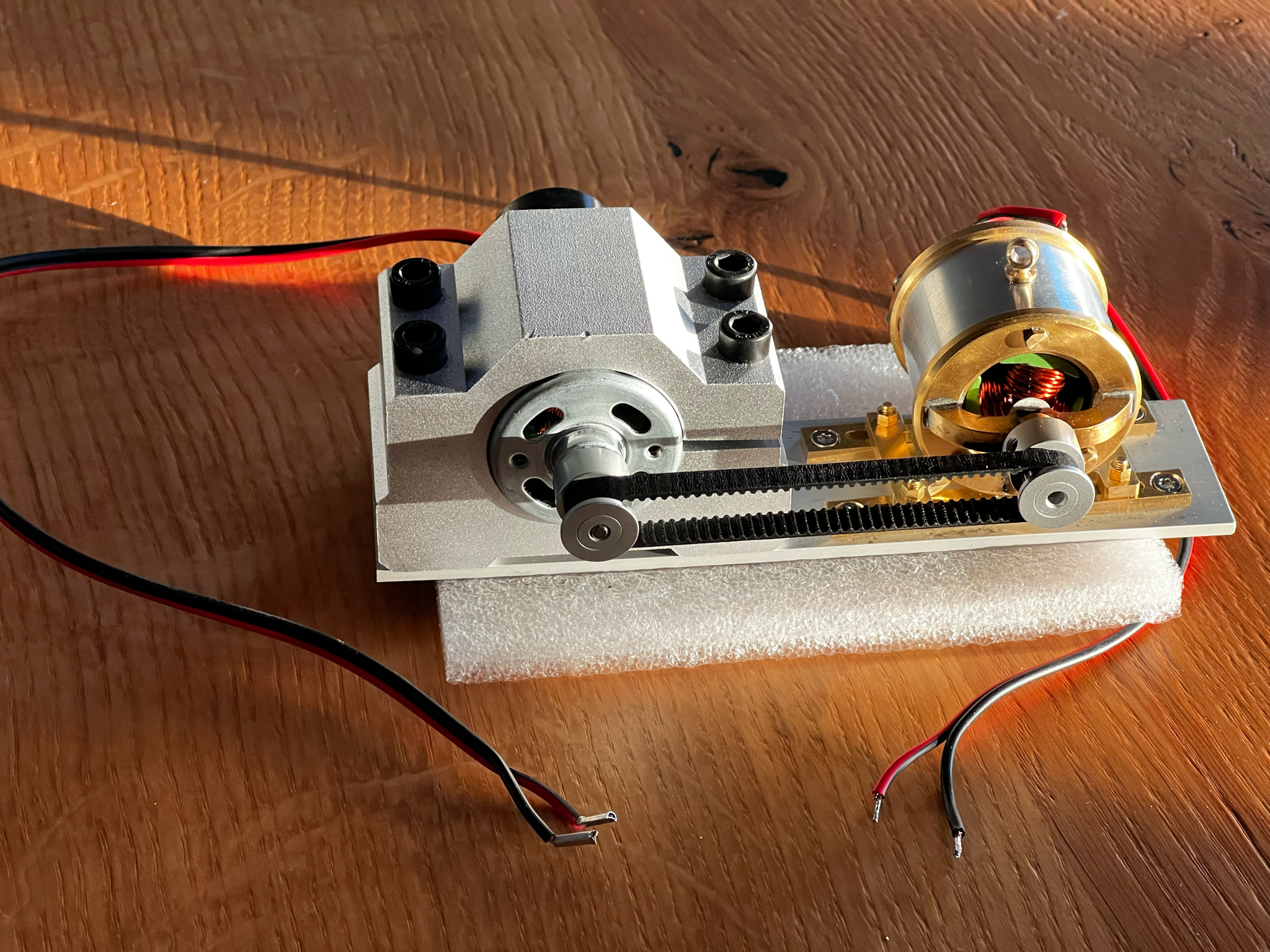
Die stufenlose Verschiebbarkeit erlaubt auch den schnellen Wechsel auf andere als das bisher verwendete 1 : 1 Übersetzungsverhältnis zwischen Antriebsmotor und Prüfling. Endlose, geschlossene 2GT Zahnriemen habe ich in verschiedenen Längen im Vorrat.
Antriebsmotor
In meinem vorigen Beitrag hatte ich im Prototypen noch Motoren der gleichen Durchmesserklasse RS-5** sowohl als Antriebsmotor als auch als Prüfling verwendet. Bei einem – zugegeben – groben Belastungstest des Generators brach dann die Drehzahl des Systems auf nur noch ca. 20% der Leerlaufdrehzahl ein 🙄.
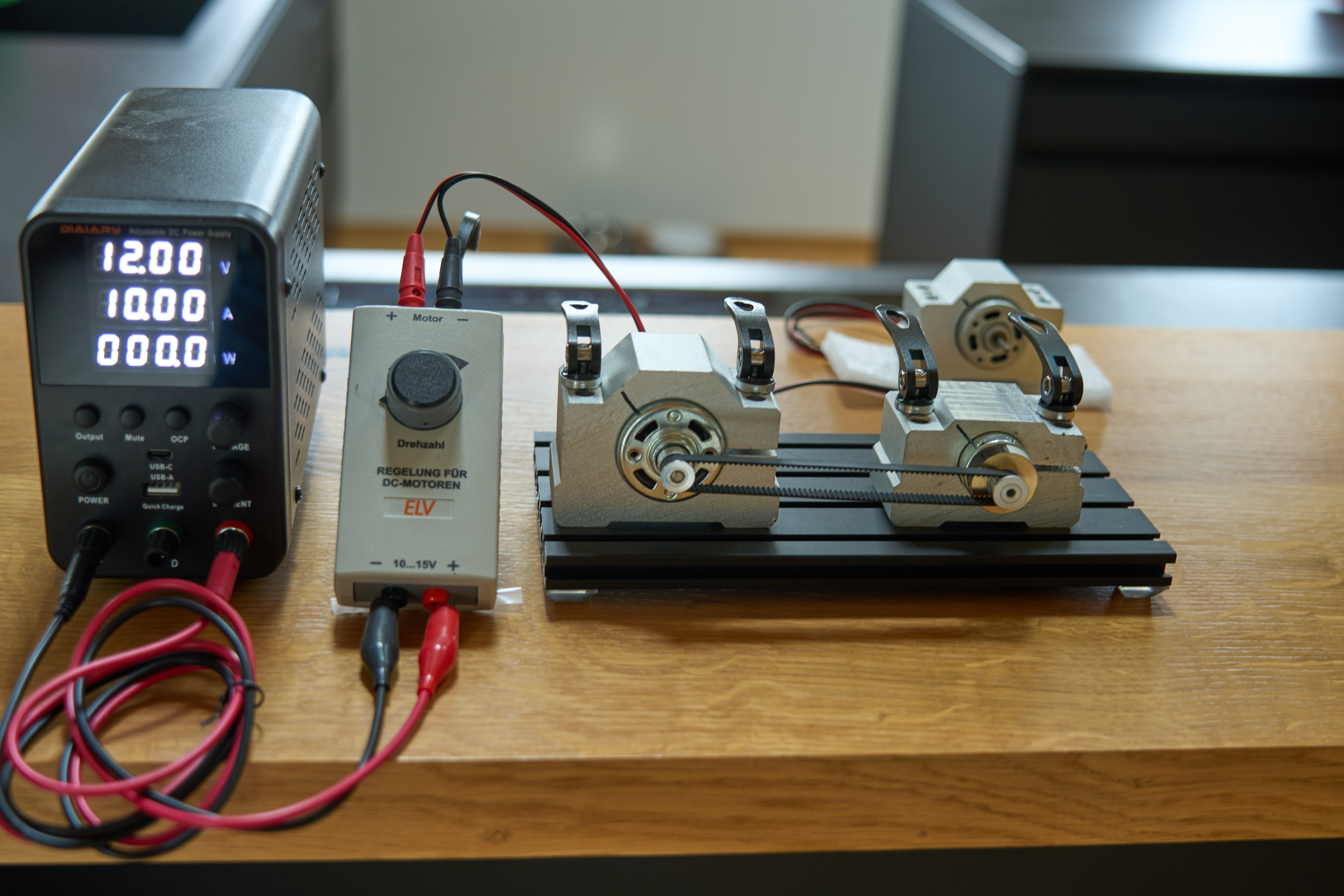
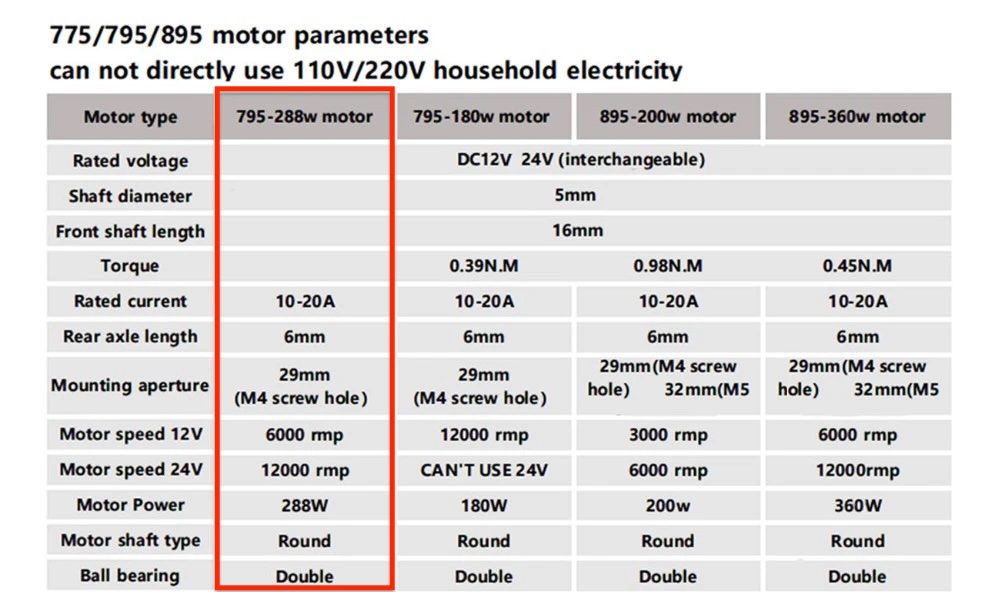
Auch wenn dieser Drehzahleinbruch ein starkes Indiz für die Höhe der entnommene Leistung ist, kann ich derartige Beliebigkeit für belastbare Aussagen natürlich nicht brauchen. Ich habe mich daher für einen Antriebsmotor aus dem 7er Sortiment entschieden, einen 795er mit einer spezifizierten Maximalleistung von 288 W (viel hilft viel) 😊, damit der sich hoffentlich bei einer Leistungsentnahme durch den Prüfling im unteren zweistelligen Wattbereich drehzahlmässig entsprechend unbeeindruckt zeigen würde:
Zusätzlich stelle ich diesem Antriebsmotor noch eine «Lastunabhängige(!) Drehzahlregelung» zur Seite, welche ich aus einem ELV-Bausatz fix zusammenlöten konnte. Diese nutzt das Prinzip der Pulsweiten Modulation (PWM). Dabei wird der Regelung eine Spannungsquelle von (stabilisierten) 12 Volt als Eingang übergeben. Die Regelung bedient sich dann innerhalb dieser vorgegebenen Spannungsgrenze und passt das Tastverhältnis (Einschaltdauer relativ zur Periodendauer) so an, dass die tatsächliche Drehzahl des Motors mit der durch Poti vorgegebenen Solldrehzahl auch unter veränderlichen Belastungen weitgehend konstant bleibt. Wer sich für die Details der Schaltung interessiert: die sind hier beschrieben.
Das funktioniert nach meiner ersten Beobachtung tadellos, auch wenn bei plötzlichen Laständerungen eine kurze(!) Drehzahlschwankung wahrnehmbar ist, welche dann aber auch ähnlich kurzfristig wieder automatisch ausgeregelt wird.
Mein Ziel ist, bei einer konstanten Antriebsdrehzahl den Prüfling in verschiedenen, ansteigenden Stufen kontrolliert zu belasten, zwischen offenen Generatorklemmen (Lastwiderstand = ∞) und «Kurzschluss» (Lastwiderstand gleich Summe aus Innenwiderstand des Prüflings plus Summe der Widerstände der involvierten Verkabelung) und dabei die entnommene elektrische Leistung zu messen und natürlich in einem Diagramm aufzutragen.
Diese Messreihe dann je Prüfling für unterschiedliche Drehzahlen zu wiederholen, und dann nochmals für verschiedene Prüflinge an markanten Stellen des Spektrums (langsam drehende Motoren mit hoher Windungszahl bei dünnem Draht, bis schnelldrehende Motoren mit geringer Windungszahl bei dickem Draht) zu wiederholen.
Kontrollierte Belastung
Ich hatte gehofft, für eine kontrollierte Belastung des Prüflings meine vorhandene Elektronische Last nutzen zu können.
Nach entsprechenden Versuchen, speziell: Modus «konstanter Widerstand», musste ich leider feststellen, dass die interne Regelung des DL24P zu instabil ist um diesen Anwendungsfall sauber abzudecken. In einem leider sehr weiten Grenzbereich reagierte dessen interne Regelung mit einem ausgesprochenem «Pumpen», d.h., Abbruch der kontrollierten Belastung durch den eingestellten (eigentlich: konstanten) Lastwiderstand und zeitverzögerter erneuter Belastung. Für meine Zwecke leider unbrauchbar, auch wenn die digitale und in kleinsten Schritten einstellbare Belastung eigentlich ideal gewesen wäre 🥲, wenn sie denn echt konstant eingehalten worden wäre.
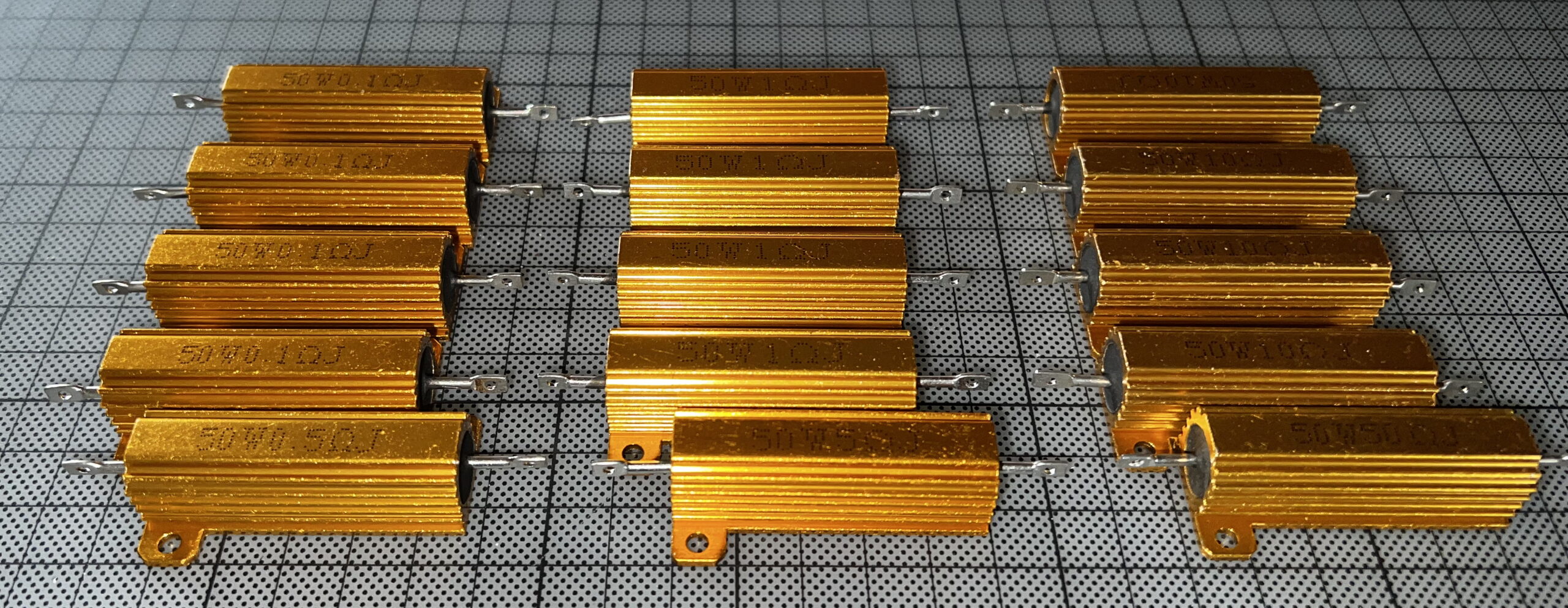
Ich werde die kontrollierte und reproduzierbare Belastung daher durch einen Satz Hochlastwiderstände (Belastbarkeit: 50W) vornehmen, welche mir bereits vorliegen und die drei Dekaden zwischen 1Ω, 10Ω und 100Ω lückenlos mit einer Schrittweite von 0.1Ω abdecken:
Ich werde weiter berichten 😊