
Executive Summary
Im Zusammenhang mit dem «Tuning» des «Generator» Bausatzes der Firma Bengs Modellbau tauchte die Frage auf, welche Eigenschaften ein Elektromotor haben müsse, …
… damit er in einem Modellbau typisch niedrigen Drehzahlbereich von bis zu 1000 U/min, «mehr» elektrische Leistung abgeben könne.
P.S.: im obigen Video wurde der Generator im technischen Sinne natürlich nicht «kurz» geschlossen, jedoch sehr niedrigohmig mit der Summe aus seinem Innenwiderstand, den Übergangswiderständen an den Kohle-Bürsten sowie dem ca. 30 cm langen zweiadrigen Anschlusskabel mit je 0.75 mm2 belastet.
Durch Vergleich der serienmässigen Motorabmessungen wurde die Klasse der R*-38* Motoren (also z.B. RS-385, RK-380) als Abmessungs-kompatibel mit dem genannten Bausatz identifiziert. Die elektrischen Eigenschaften derartiger Motoren werden hauptsächlich durch deren Wicklungs-Charakteristik, also Drahtdurchmesser, Windungsanzahl und Polzahl des Ankers bestimmt und weisen eine erhebliche Variationsbreite auf.
Um hier einen Überblick über das breite Spektrum der angebotenen R*-38* Motoren zu erhalten, wurde hauptsächlich auf Aliexpress recherchiert und die Ergebnisse in einer filterbaren und sortierbaren Excel-Tabelle zusammengetragen (Am Ende des Artikels zum Download bereitgestellt).
Aus Symmetriebetrachtungen entstand die Hypothese, dass ein Elektromotor im Generatorbetrieb genau in dem Drehzahlbereich den besten Wirkungsgrad aufweist, in dem er auch als Motor den besten Wirkungsgrad zeigt. Daraus folgt unmittelbar, dass im sehr niedrigen Drehzahlbereich möglicher Modellbau-Antriebe vor allem diejenigen Elektromotoren als Generatoren erfolgreich sein würden, die von Hause aus eine ähnlich sehr niedrige Leerlaufdrehzahl aufweisen. Denn die Drehzahl besten Wirkungsgrades liegt für Bürsten-Gleichstrommotoren lt. Literaturangaben im Bereich von etwa 50% bis 80% der Leerlaufdrehzahl.
Eine entsprechende Filterung der o.a. Excel-Tabelle nach Datensätzen für gleiche Betriebsspannung (12 V) und anschliessende Sortierung nach Windungsanzahl der Motorwicklungen ergab mit hoher Signifikanz, dass die Windungsanzahl nahezu ausnahmslos umgekehrt proportional zur Leerlaufdrehzahl ist. D.h.: je mehr Windungen, desto langsamer der Motor.
Erste Tests bestätigen die aufgeführten Hypothesen eindrucksvoll. Weitere Tests mit dem Ziel konkreter Empfehlungen wurden inzwischen bereits durchgeführt. Ergebnisse und Empfehlungen habe ich in einem abschliessenden Folgeartikel zusammengefasst.
Langfassung
In meinem vorigen Beitrag über den Generator++ – Wolf im Schafspelz hatte ich locker in den Raum gestellt, dass «nichts dagegen» spreche, den derart «gepimpten» Motor auch als Generator zu betreiben. Dies wollte ich gerne genauer wissen und auch mit belastbaren Zahlen untermauern.
Grundlagen
Bei Gleichstrom Motoren oder -Generatoren handelt es sich um Energiewandler, in denen Energie weder erzeugt («generiert») noch vernichtet (oder «verbraucht») wird. Statt dessen wird eine Energieform, z.B. mechanische Energie in eine andere, z.B. elektrische Energie umgewandelt, oder umgekehrt. Jede Umwandlung von einer Energieform in eine andere ist immer mit Verlusten, d.h. einem Wirkungsgrad < 100% behaftet. Typisch werden bei Elektromotoren der in unserem Modellbau verwendeten Grössenordnung beste Wirkungsgrade von max. ca. 65% erreicht, bei schlechter Anpassung meist wesentlich(!) weniger.
Um einem Generator z.B. 10 W elektrische Leistung entnehmen zu können, muss man ihn mit mindestens(!) 10 W / 65% > 15 W mechanischer Leistung speisen. Diese Leistungsabgabe(!) wirkt bremsend auf die Antriebsmaschine.
Ein Antrieb für den Generator muss her!
Leider habe ich unter meinen bisher gebauten Modellen aus dem Angebot von Modellbau Bengs (Dampfmaschine «Danni», Flammenfresser «Jarne», Stirlingmotoren «Laura» und «Rainer») kein Modell, welchem ich eine mechanische Abgabeleistung wenigstens im oberen einstelligen Wattbereich zutrauen würde. Aber da es mir zunächst nur um die Leistungsfähigkeit des «Generator++» geht, kann ich die Frage des Generator-Antriebs vorläufig in den Hintergrund schieben. Und vielleicht haben ja einige der Leserinnen und Leser z.B. einen ausreichend potenten Verbrennungsmotor als Antriebsmaschine?
Wie auch immer: inzwischen kann ich bereits auf einen kleinen Park verschiedenster Gleichstrom Elektromotörchen blicken welche ich mir zu Testzwecken zugelegt habe. Also habe ich kurzerhand einen kleinen Motoren/Generatoren Prüfstand gebaut. Hierin kopple ich zwei Gleichstrom Elektromotoren unter Einsatz von 2GT Zahnriemen und passenden Riemenscheiben schlupffrei und ohne Drehzahländerung aneinander. So kann ich wahlweise jeden der beteiligten Motoren sowohl als Antriebsmotor des jeweils anderen verwenden, als auch als angetriebenen Generator.
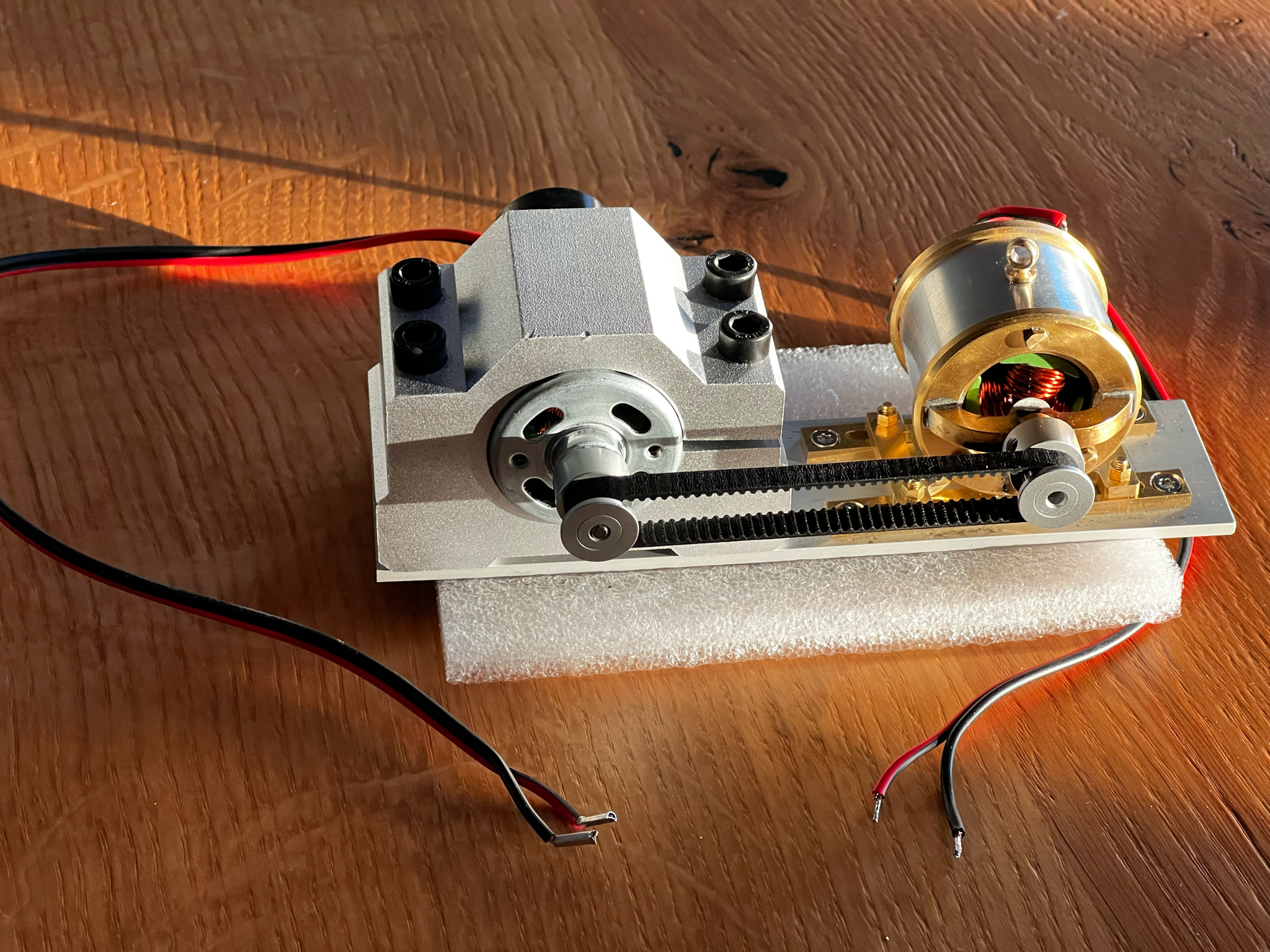
Der rechte der beiden in diesem Prüfstandsaufbau verwendeten Motoren/Generatoren ist mein Generator++, mit dem Herz eines RS-540 Motors. Diesen hatte ich eher zufällig ausgewählt, weil mir einerseits der ikonische dreipolige Anker gefällt und andererseits, weil ich ihn bei Bestellung über Digitec/Galaxus bereits am Folgetag auf meinem Schreibtisch liegen hatte 🙄. Weitere Überlegungen ausser, dass es aufgrund von Platzbeschränkung im «Generator» Bausatz ein Motor der R*-54* Klasse sein sollte, waren bei der Auswahl nicht involviert.
Für den zweiten Motor im oben abgebildeten Prüfstandsaufbau hatte ich mir bereits weiterreichende Gedanken gemacht: die Theorie, nach der ein Motor im Generatorbetrieb genau dann seinen besten Wirkungsgrad zeigen würde, wenn man ihn möglichst nahe der Drehzahl antreibt, bei der er als Motor seinen besten Wirkungsgrad hat, hatte begonnen, sich in meinem Kopf zu verdichten. Um diese Theorie zu testen, hatte ich im Internet nach Motoren gesucht, welche eine möglichst _niedrige_ Leerlaufdrehzahl aufweisen. Weil in unserem Modellbau-Kontext typischerweise _niedrigtourige_ Antriebsmaschinen vorherrschen, mit Drehzahlen von vielleicht 1’000 U / min. Solche Motoren sind per Schlüsselwort-Suche schwer zu finden, weil die meisten Anbieter aus unerfindlichen Gründen regelmässig mit dem Top-Speed werben, für welche ich irrwitzige Werte von bis zu 59’000 U/min gefunden habe 😳.
Profi-Tip: Motoren, die für «Vibrations»-Anwendungen vermarktet werden, vereinen regelmässig die beiden gewünschten Eigenschaften «lange Wellenstummel» (häufig sogar beidseitig!) und «niedrige Leerlaufdrehzahl» miteinander. Diese Überlegungen brachten mich auf den im Prüfstand linken Motor, einen RF-545.

Dieser Prüfstand ist bisher nur eine Machbarkeitsstudie mittels eines hart-kodierten (=gebohrten) Prototyps – die Teile für einen universeller nutzbaren Prüfstandsaufbau sind bestellt. Insbesondere wird der zukünftige Prüfstand zwei «generische» Klemmen beinhalten, mit denen ich beliebige Antriebsmotoren und Generatoren der RS-3** Klasse (Motoren-ø ≈ 28 mm) und der RS-5** Klasse (Motoren-ø ≈ 36 mm) stressfrei aneinander koppeln kann, auch bei Wechsel der Übersetzungsverhältnisse zwischen den beteiligten Partnern. Für das Auflegen und Spannen des Zahnriemens bei der derzeit fest eingestellten 1 : 1 Übersetzung habe ich die Befestigungsbohrungen der Spannschienen des «Generator++» so plaziert, dass ich mit dem serienmässigen Verfahrweg von 10 mm in den Langlöchern der Spannschienen gut auskomme.
Motorbezeichnungen verstehen
Woran kann man einen besser geeigneten als den derzeit im «Generator» Bausatz verwandten Motor erkennen? Der Motorenhersteller Mabuchi Motor C0., Ltd. verwendet ein (aus meiner Sicht) sehr überzeugendes Schema für Typbezeichnungen, welches die wesentlichen Eigenschaften eines Motorentyps bereits in dessen Namen = Typbezeichnung kodiert.
Andere Motorenanbieter mögen ähnlich leistungsfähige – vielleicht sogar bessere? – Motorentypen in ihren Sortimenten haben: die kann man allerdings nicht gezielt aufsuchen oder auffinden, weil ich bisher, trotz intensiver Suche, nur für Motoren von Mabuchi eine hilfreiche Dokumentation der Zuordnung technischer Eigenschaften zu Typbezeichnungen gefunden habe. Und die sieht so aus:

Für eine detailliertere Erläuterung der einzelnen Typbezeichnungsbestandteile bitte auf die obige Grafik klicken.
Im Zusammenhang mit dem Tuning des «Generator» Bausatzes ist zuallererst der erste Buchstabe «R» relevant: wir interessieren uns nur für kreisrunde Bauformen von Motoren. Der zweite Buchstabe kodiert das Bürstenmaterial (z.B. Kohle, Metall, Edelmetall) und dürfte für unseren Anwendungsfall lediglich auf die Kosten eines Motors Einfluss haben.
Interessant und für unseren Anwendungsfall relevant ist die erste Ziffer der dreistelligen Zahl. Als Abmessungs-kompatible Austauschmotoren für den «Generator» Bausatz kommen solche mit einer führenden «3» in Frage: dieser Wert kodiert den Durchmesser des Motorgehäuses von ≈28 mm und garantiert damit die Abmessungs-Kompatibilität mit den beiden «Lagerdeckeln», «Lagerbögen» und «Verstärkungsbögen» des Bausatzes. Zusätzlich sind für diese «3er-Klasse» von Motoren die folgenden Abmessungen festgelegt:

Die zweite Ziffer der dreistelligen Zahl der Typbezeichnung ist ein Schlüssel für die Länge des Motorgehäuses (ohne Ausbuchtungen für die beiden Lager). Ich habe bei meinen Recherchen im Internet Exemplare von R*-36*, R*-37*, R*-38* und R*-39* Motoren gefunden. Die entsprechenden Gehäuselängen sind die folgenden:
- R*-36*: ≈ 32.5 mm
- R*-37*: ≈ 30.8 mm
- R*-38*: ≈ 37.8 mm
- R*-39*: ≈ 46.5 mm
Alle Motoren, die unter die oben genannten Suchkriterien fallen, könnten grundsätzlich durch Anpassung der Länge des «Gehäuse, Teil 3» für den «Generator» Bausatz verwendet werden (soweit weitere Kriterien dem nicht entgegen sprechen – ich komme noch darauf zurück).
Die dritte Ziffer der dreistelligen Zahl der Typbezeichnung ist ein Schlüssel für die Polzahl des Motorankers. Eine «0» kodiert hierbei einen dreipoligen Anker, eine «5» einen fünfpoligen Anker. In den Durchmesserklassen «3» und «5» werden keine Anker mit davon abweichenden Anker Polzahlen angeboten. Erst ab Durchmesserklasse «8» (Gehäuse-ø ≈ 49 mm, Gehäuselänge ≈ 69 mm) tauchen erste 7-polige Anker auf. Die liegen aber dann mit einem Gewicht von rund 500 Gramm und Leistungen, die an der 500 W Marke kratzen dürften, bereits weit ausserhalb unserer Modellbau Kragenweite.

Wenn es auch für die geometrische «Passform» eines Tuning-Ersatzmotors zur Verwendung im «Generator» Bausatz nicht relevant ist, so hat die Polzahl des Ankers trotzdem nicht nur kosmetische Bedeutung: zunächst ist das Rastmoment eines dreipoligen Ankers grösser als das eines fünfpoligen Ankers, cetris paribus. Unter dem Rastmoment versteht man das Bestreben eines Ankers eines permanent erregten Gleichstrommotors, beim manuellen, stromlosen Durchdrehen an bevorzugten Positionen quasi «einzurasten», Dies führt zu einer Welligkeit des abgegebenen Drehmoments des Ankers. Ein 3-poliger Anker weist insgesamt 3 (Ankerpole) * 2 (Dauermagnetpole) = 6 Rastpositionen auf, also alle 60° eine. Ein 5-poliger Anker weist insgesamt 5 (Ankerpole) * 2 Dauermagnetpole = 10 Rastpositionen auf, also alle 36° eine. Eine höhere Polzahl führt somit zu einer höherfrequenten Welligkeit geringerer Amplitude des im Motorbetrieb abgegebenen, als auch des im Generatorbetrieb erforderlichen Antriebsmoments. Für den Antrieb eines Modellbau Generators durch eine grenzwertig schwache Antriebsmaschine wäre ein Anker mit höherer Polzahl einem Anker mit kleinerer Polzahl also vorzuziehe, ceteris paribus.
Vielleicht nicht ganz zufällig werden die grösseren Lufträume zwischen den Zähnen eines (nur) dreipoligen Ankers gegenüber denen eines fünfpoligen Ankers gerne für Wicklungen mit dickeren Drahtdurchmessern genutzt, wie oben abgebildet. Damit nähern wir uns erstmalig den für eine Eignung als Generator entscheidenden «Inneren Werten» eines Gleichstrommotors 😊
Zwischenfazit
Durch Vergleich der Abmessungen des dem «Generator» Bausatz beiligenden Johnson Motors vom Typ 30037 mit den bisherigen Ausführungen kann ich nun bestätigen, dass es sich um einem zum Mabuchi Typ RS-385 Abmessungs-kompatiblen Motor handelt.
Damit sind aber erst die Hauptabmessungen Gehäusedurchmesser und -Länge abgedeckt. Zusätzlich wird für die Verwendung im «Generator» eine ausreichende Länge des (oder der beiden!) Wellenstümpfe benötigt. Hier muss man leider im Detail die Abmessungsangaben der jeweils angebotenen Motoren studieren und mit den eigenen Anforderungen abgleichen.
Innere Werte
Bisher hatte ich für die Eignung als Austauschmotor für den im Bausatz «Generator» verwendeten alleine die äusseren Abmessungen (inkl. Länge der Wellenstümpfe) herangezogen. Aber die Typbezeichnung nach Mabuchi-Schema hat noch weitere Informationen zu bieten: so liefert die eine Typbezeichnung abschliessende meist 4 oder 5-stellige Zahl Information zum verwendeten Drahtdurchmesser und der Anzahl der Windungen pro Wicklung. Es dürfte unmittelbar einleuchten, dass im begrenzten Luftraum zwischen zwei benachbarten Ankerzähnen nur eine begrenzte Menge «Kupfer» untergebracht werden kann. Man kann hier wenige Windungen eines dicken Drahts unterbringen, oder viele Windungen eines dünnen Drahts. Und natürlich beliebige Zwischenstufen zwischen beiden.
Diese Wahl der Wicklungskonfiguration hat entscheidenden Einfluss auf die Motorcharakteristik, und damit auf die Eignung eines Motors als Generator!
Z.B. können zwei verschiedene Motoren im Generatorbetrieb gleiche Leistung einmal bei hohem Antriebsmoment und geringer Drehzahl, oder bei niedrigem Antriebsmoment und hoher Drehzahl abgeben. Die gleiche, resultierende elektrische Leistung kann bei hoher Spannung und geringer Stromstärke, oder bei niedriger Spannung und hoher Stromstärke anfallen.
Um hier einen Überblick über die schier unendliche Vielzahl der z.B. auf Aliexpress angebotenen Gleichstrom Motoren in den unterschiedlichsten Konfigurationen zu gewinnen, habe ich von Hand (manuell, visuell) das Spektrum an Motoren der RS-385 Klasse ohne Anspruch auf Vollständigkeit abgeerntet und die gefundenen Daten in eine sortierbare und filterbare Excel-Tabelle überführt (am Ende dieses Beitrags als downloadbare Excel-Tabelle angehängt). Ich habe mich hier auf Motoren der RS-385 Klasse beschränkt, mit wenigen Exemplaren der RS-380 Klasse zur Vervollständigung. Dies unter der Annahme, dass die meisten Leser mit möglichst geringem Aufwand an mechanischen Modifikationen dem serienmässigen «Generator» Bausatz durch schlichten Motortausch auf die Sprünge helfen wollen.
Durch meinen Umbau eines «Generator» Bausatzes zum «Generator++» wurde der dem Bausatz beiliegende Johnson 30037 «frei». Durch Abwicklen einer seiner Ankerwicklungen weiss ich nun, dass er je Wicklung mit 73 Windungen Kupferdraht mit Durchmesser 0.21 mm bewickelt ist. Im Mabuchi-Jargon wäre das ein RS-385**-2173.
Wer ambitionierter ist und den Umbau des «Generator» vom RS-385 auf ein Innenleben der leistungsfähigeren RS-5** Klasse unternehmen möchte, findet in meinem Beitrag Generator++ – Wolf im Schafspelz einen umfangreichen und ausführlich bebilderten Umbaubericht. Die grundsätzlichen physikalischen Zusammenhänge sind aber für beide Motorenklassen die gleichen.
Spoiler Alert: die Verwendung eines RS-540SH-7525 im Generator++ macht zwar optisch ordentlich was her, war aber – wie ich inzwischen erkannt habe – im Hinblick auf eine Leistungssteigerung bei Verwendung als Modellbau-Generator (=> 1000 U/min!) keine gute Wahl. Da gibt es sehr viel geeignetere Motoren der RS-5** Klasse.

Symmetrie, bitte!
Ich möchte es einmal vorsichtig formulieren: mir ist kein Mechanismus bekannt, der für Motorbetrieb oder Generatorbetrieb eines Gleichstrommotors signifikant unterschiedliche Verläufe der Wirkungsgradkurven rechtfertigen würde. Quellen im Internet geben an, dass Bürsten-Gleichstrommotoren ihren besten Wirkungsgrad bei Drehzahlen erreichen, welche bei etwa 50 – 80% ihrer Leerlaufdrehzahl liegt. Der Symmetriegedanke legt nahe, einen Generator möglichst nahe der Drehzahl anzutreiben, bei der er als Motor seinen besten Wirkungsgrad aufweisen würde.
Für den RS-540, der derzeit das Herz meines «Generator++» beisteuert, lag der Verpackung sowohl ein Leistungsdiagramm als auch eine textliche Beschreibung wesentlicher technischer Daten bei:
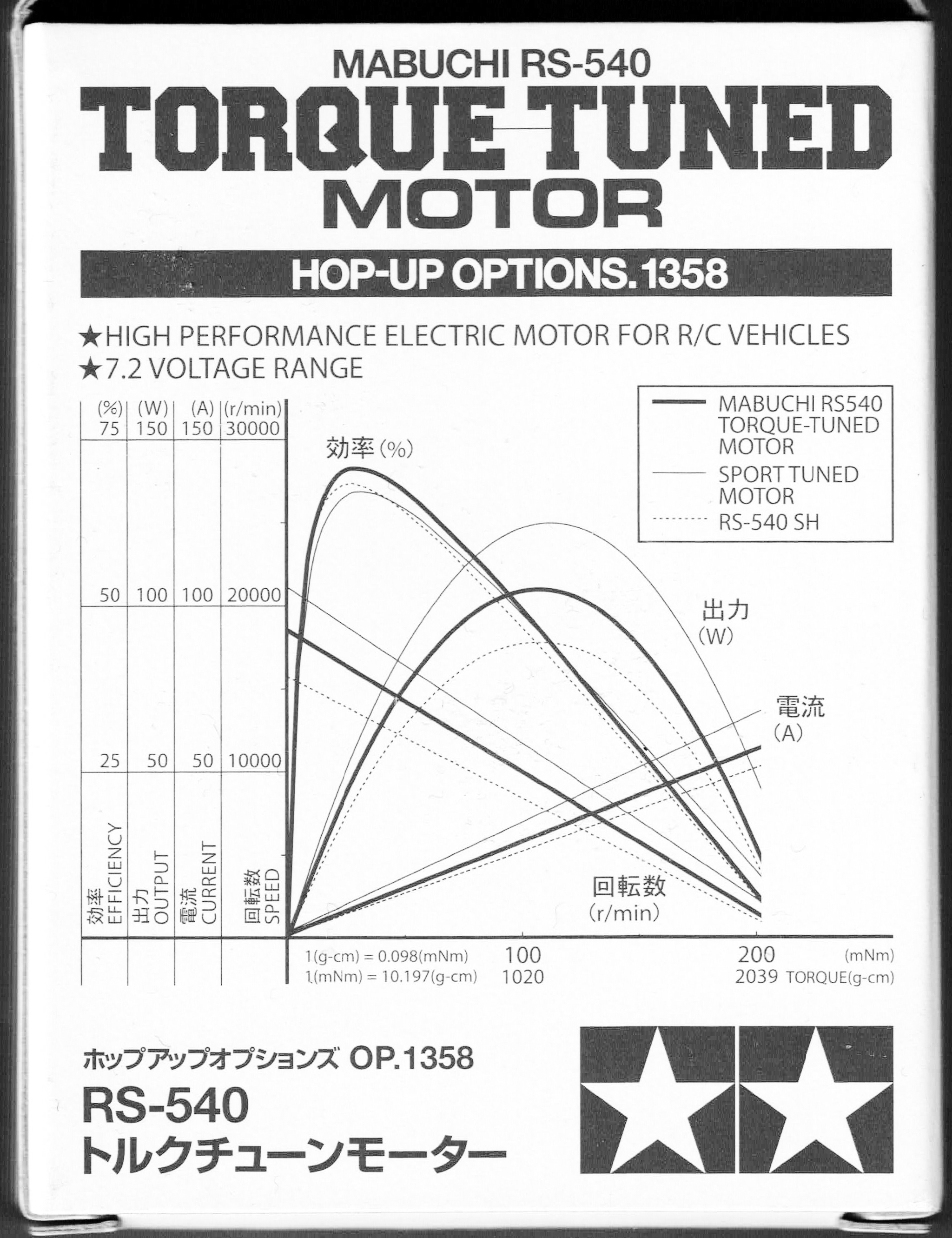

Für den von mir durch den Einbau in den «Generator++» modifizierten RS-540SH-7525 habe ich eine Leerlaufdrehzahl von rund 21’000 U/min berührungslos gemessen. Die auf der Produktverpackung des RS-540 angegebene Drehzahl für besten Wirkungsgrad von 16’000 U/min liegt mit rund 76% der Leerlaufdrehzahl sogar am oberen Rand des oben genannten Intervalls. Wenn ich den «Generator++» in meinem provisorischen Motorprüfstand durch den derzeitigen RF-545 mit einer Spannung von 12 V antreibe erreicht das Sytem eine Drehzahl von 2’600 U/min. Dabei zieht der Antriebsmotor bei unbelasteten, d.h. «offenen» Klemmen des Generators 3.0 Watt elektrische Leistung. Durch Kurzschliessen der Generatorklemmen sinkt die Drehzahl des Systems auf 2100 U/min, die elektrische Antriebsleistung des Systems verdoppelt sich auf 6.2 Watt.
Die Gegenprobe:
Der «Generator++» mit dem Herz eines RS-540SH-7525 treibt, diesmal als Antriebsmotor, den RF-545 (berührungslos gemessene Leerlaufdrehzahl bei 12 V: 2’925 U/min) mit ca. 2’700 U/min an. Und dann geht regelrecht die Post ab: beim Kurzschliessen der Generatorklemmen funkt es kurz 🫣 und die Drehzahl fällt blitzartig um 80% auf ca. 550 U/min ab, während sich die vom Antriebsmotor aufgenommene elektrische Antriebsleistung von ca. 5.5 Watt trotz des markanten Drehzahlabfalls auf 11.4 Watt mehr als verdoppelt!
Zugegeben: die Kurzschluss-Methode ist arg grob 🙄, zeigt dafür aber blitzschnell, dass der als Generator verwendete RF-545 bei Antrieb nahe seiner Drehzahl besten Wirkungsgrades dem System soviel Leistung entziehen kann, dass die Drehzahl auf rund 20% der Drehzahl des unbelasteten Systems einbricht. Diese Leistungsabgabe (nicht der resultierende Drehzahleinbruch!) geht also ganz klar in die gewünschte Richtung 💪😊. Der beobachtete Drehzahleinbruch ist dem Umstand geschuldet, dass ich lediglich die Betriebsspannung des offensichtlich zu schwachen Antriebsmotors konstant halte, nicht jedoch dessen Drehzahl. Da muss ich mir noch etwas überlegen, ob/wie ich dies verbessern kann.
Parallel dazu habe ich meine elektronische Last, eine DL-24P, die ich mir für die kontrollierte Entladung meines E-Bike Akkus zugelegt hatte, wieder ins Spiel gebracht.
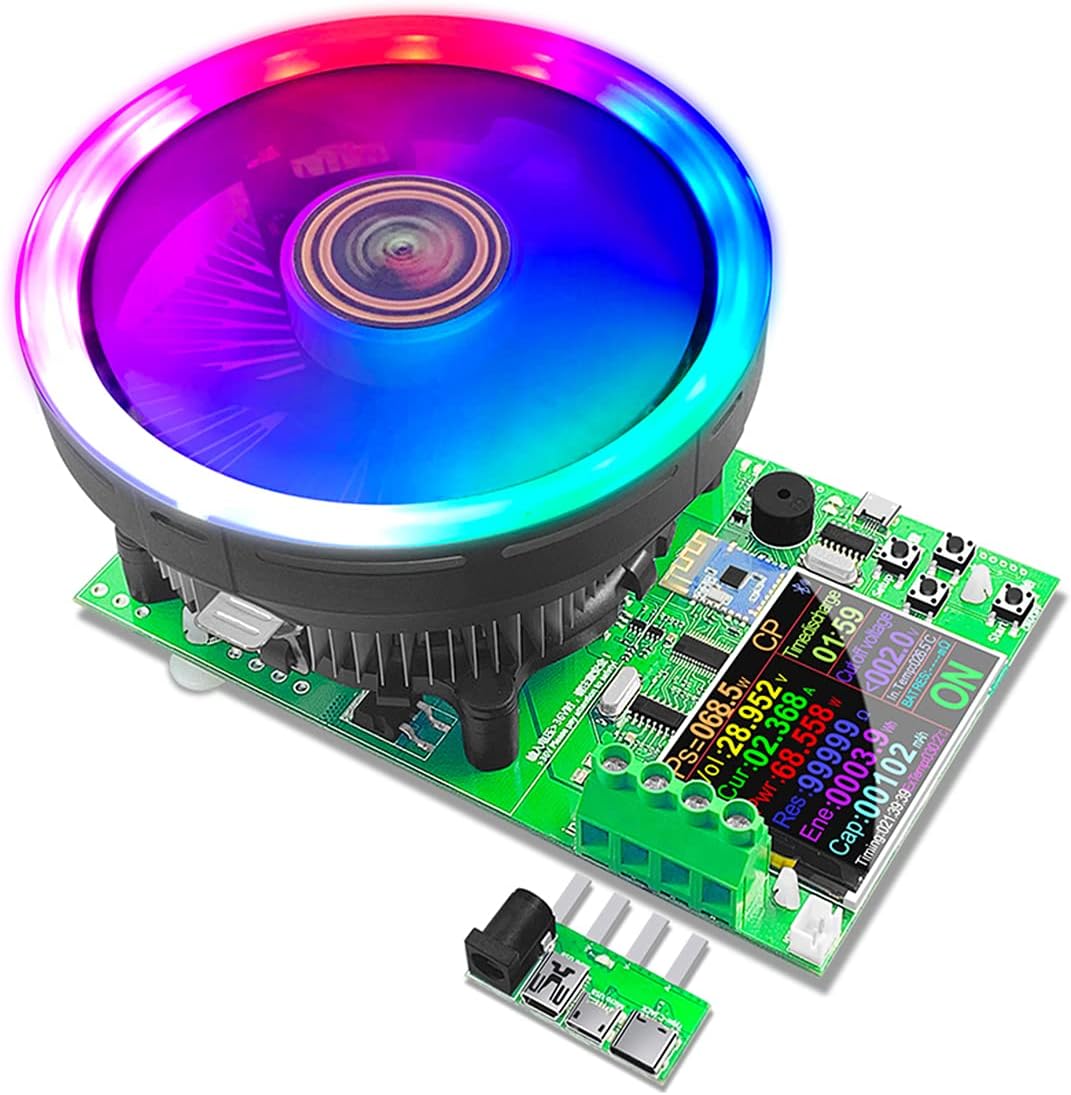
Diese unterstützt die Betriebsarten «konstante Spannung», «konstante Stromstärke», «konstanter Widerstand» und «konstante Leistung». Damit hoffe ich, den Generator im Testbetrieb kontrolliert, reproduzierbar und differenzierter belasten können als mit der Kurzschluss-Methode.
Excel Tabelle
Deren Spalten A – I dürften selbsterklärend sein.
Die Spalten J – T habe ich ausgeblendet. Sie enthalten sehr lückenhafte Daten zum Betriebspunkt bester Effizienz, maximaler Leistung und dem Punkt des blockierten Motors und stammen überwiegend aus Datenblättern des (Marken-) Herstellers und sind insofern besonders(!) vertrauenswürdig.
In der Spalte U «Quelle» gebe ich an, woher die Daten stammen. Sie können indirekt als Angabe zur Datenqualität (Zuverlässigkeit) verstanden werden, da die meisten Anbieter auf Aliexpress lediglich Händler sind die von der konkreten Materie wenig Ahnung haben und lediglich einzelne Chargen verticken.
In der Spalte V habe ich noch den Kupferquerschnitt [mm2] ausgerechnet, als schlichtes Produkt der Kreisfläche des Drahtdurchmessers mal Windungsanzahl. Man erkennt hier, dass die fünfpoligen Motoren der 385er-Klasse in einem recht schmalen Band mit einem Mittelwert von ≈ 2.8 mm2 angeordnet sind, die Motoren der 380er-Klasse jedoch mit einem «Mittelwert» von ≈ 5.0 mm2 signifikant nach oben abweichen.
Für die meisten Motoren wurden von den jeweiligen Anbietern mehrere Datensätze für unterschiedliche Betriebsspannungen angegeben, welche ich alle als separate Datensätze aufgenommen habe.
Für den nachfolgenden Screenshot habe ich (wegen eines fairen Vergleichs) die Tabelle nach Datensätzen nur für die Betriebsspannung 12 Volt gefiltert (Spalte «D», rot), danach nach der Anzahl der Ankerwindungen sortiert (Spalte «G», blau). Die Reihenfolge der Leerlaufdrehzahlen (Spalte «H», grün) ist das Resultat der vorgängigen Filterung und Sortierung.

Die nachfolgend zum Download angehängte Excel-Tabelle enthält aber alle von mir erfassten Datensätze. Für evtl. eigene Filterungen und/oder Sortierungen unbedingt darauf achten, vorher den gesamten Datenbereich A7:V77 zu markieren!