
Das FYRTUR von IKEA® ist ein smartes, drahtloses und akkubetriebenes Verdunklungsrollo.

«Smart» bedeutet hier, dass es in ein «Smart Home System» eingebunden werden kann und z.B. per App gesteuert und auch programmiert werden kann. So kann es z.B. automatisch zu vorher festgelegten Zeiten und bis zu programmierten Höhen hoch bzw. runter gefahren werden.
Das FYRTUR gibt es in verschiedenen Grössen, von 60 cm bis 140 cm Breite x jeweils 195 cm Länge. Die Antriebseinheit, um die es in diesem Teardown geht, ist für alle Breiten gleich – das ist schonmal gut.
What’s inside the box?
Im Kleinteile-Fach der Verpackung befindet sich diesmal kein IKEA® Inbusschlüsel, sondern eine Reihe von Elektro Komponenten, die das Rollo erst smart, drahtlos und akkubetrieben machen:

Von oben rechts, im Uhrzeigersinn:
- USB-A Steckernetzteil
- Signalverstärker mit USB-A Stecker und USB-A Buchse (daisy-chain-fähig mit obigem Steckernetzteil)
- Akku
- Funkfernbedienung
- USB-A auf Micro-USB Ladekabel
Das Steckernetzteil ist unspektakulär und liefert max. 1.0 A an seinem Ausgang, passend zum Akku.
Der Signalverstärker hilft, das schwache Signal der Fernbedienung auch an weiter entfernte Rollos weiterzureichen.
Beim Akku handelt es sich um einen Li-Ion Typ mit 7.2 V Spannung und 2’600 mAh Kapazität. Mit einer vollen Ladung soll er bei einmal täglichem Auf- und Abfahren des Rollos über die volle Länge etwa 6 Monate lang durchhalten bis er wieder aufgeladen werden muss. Hier eine Nahaufnahme mit sämtlichen technischen Daten:

Bemerkenswert ist, dass der Akku mit dem mitgelieferte Steckernetzteil und Ladekabel über seine Micro-USB Buchse mit 1.0 A geladen werden kann, und über seinen vierpoligen Kontakt (im Foto oben links) sogar mit 2.0 A schnellgeladen werden könnte. Wenn man ein passendes Ladegerät und eine passende, vierpolige «docking station» für den Akku hätte (beides nicht im Lieferumfang enthalten).
Die Funkfernbedienung ist von zweckmäßiger Schlichtheit, wird von einer CR 2032 Knopfzelle (mitgeliefert) betrieben und kennt die beiden Befehle «auf» und «ab». Was braucht man mehr? Dank eines innenliegenden Permanentmagneten kann sie leicht an einer mitgelieferten Wandhalterung befestigt werden, jedoch auch jederzeit mobil verwendet werden.
Das Rollo selbst weist an der linken Frontseite für eine manuelle Bedienung zwei Eingabe-Tasten auf, sowie für eine Statusausgabe eine LED. Direkt rechts daneben befindet sich die Klappe für das Fach des entnehmbaren Akkus:

Der Störungsfall
Ursula und ich haben zwei FYRTUR an den zur Strasse weisenden Fenstern unseres Büros. Diese verrichteten klaglos ihren Dienst, bis neulich eines von beiden es eben nicht mehr tat. Es blieb auf halber Höhe stehen.
Klarer Fall von «Akku leer», dachte ich. Weil wir den Akku innerhalb von bisher 18 Monaten bei sporadischer Nutzung und jeweils nur über einen Teilhub noch nie(!) nachladen mussten. Die oben erwähnte Status-LED am Rollo selbst kündigte den nahenden Ladebedarf zwar bereits seit ein paar Wochen durch ein kurzes Aufleuchten bei Ansteuerung über die Fernbedienung an, quasi als «Reserve»-Warnung. Ich hatte dies zwar wahrgenommen, dem aber keine Bedeutung beigemessen. Inzwischen bin ich schlauer.
Also den Akku entnommen, aufgeladen und wieder eingesetzt. Aber: weiterhin tote Hose. Nichts rührte sich, noch nicht einmal das winzigste Zucken war erkennbar. Sicherheitshalber spendierte ich der Fernbedienung eine frische Knopfzelle. Aber immer noch nichts. Selbst per Tastenbedienung am Rollo blieb das Rollo tot.
Nächste Hypothese: vielleicht ist durch die zweifache Unterbrechung der Stromversorgungen in Rollo und Fernbedienung die Kopplung zwischen Fernbedienung, Signalverstärker und Rollo verloren gegangen? Ich folgte den Anleitungen im Kapitel «Störungen bei smarten Rollos» für Neustart und Koppeln auf der IKEA® Webseite. Die drei Komponenten Fernbedienung, Signalverstärker und Rollo reagierten jeweils wie beschrieben und zeigten die versprochenen, bzw. erwarteten LED-Signale. Trotzdem: das Rollo gab weiterhin keinen Mucks von sich.
Im Vergleich zwischen unseren beiden Rollos, dem (noch) funktionierenden und dem anscheinend toten, war mir zudem aufgefallen, daß ich die Wickeltrommel des funktionierenden Rollos von Hand mit geringem Kraftaufwand verdrehen konnte, während beim toten Rollo eine anscheinend vollständige Blockade vorlag. Also vielleicht ein mechanisches Problem?
Trennung der Antriebs- und Steuerungseinheit vom Rollo
Bisher war ich nicht-invasiv vorgegangen und damit erfolglos geblieben. Also plante ich, das Gerät «aufzumachen» und zu schauen, ob man im Inneren etwas erkennen kann:
Nach Entfernung von zwei Kreuzschlitzschrauben oben im Aluprofil-Chassis des FYRTUR konte ich die komplette Antriebseinheit problemlos herausziehen:

Der Blick auf die beiden Stirnseiten:


Auch im zerlegten Zustand liess sich der Mitnehmer am Ende des Motors nicht relativ zum Rest der Einheit verdrehen.
Trennung der Motoreinheit vom Akkugehäuse
Die Motoreinheit (im wesentlichen das Alu-Rohr) ist auf die silberfarbige Stirnplatte des Kunststoffgehäuses aufgesteckt. Unter seitlichem hin- und herwackeln bei vorsichtigem axialen Zug kann man die beiden voneinander trennen. Dabei darauf achten, die Steckverbindung des vieradrigen Flachkabels nicht zu verletzen. Bitte erst weiterlesen!



Die Steckverbindung ist durch eine kleine in den Stecker integrierte Sperrklinke gegen zufälliges Lösen gesichert, im folgenden Foto oben am Stecker..

Zum gewaltfreien Lösen einen kleinen Flachschraubendreher in den Kabel-fernen Luftraum der noch gesteckten Verbindung einführen und die Sperre des Steckers in Richtung Flachbandkabel drücken, dann leicht(!) am Kabel ziehen.
Das Innenleben des Akkugehäuses
Auch wenn es nichts zur mechanischen Blockade beitragen kann, interessiert mich zunächst, was denn zwischen den zwei Akkupolen und dem vieradrigen Flachbandkabel passiert. Nach Lösen der vier Schräubchen des Akkufach-Deckels lässt sich dieser senkrecht nach oben, in axialer Richtung der soeben gelösten Schräubchen herausziehen. Dabei darauf achten, den Deckel nicht zu verkanten:

Zum Vorschein kommt das Akkufach mit vier Kontakten, von denen nur die beiden äusseren beschaltet sind:


Weiter gibt es in Inneren diese Platine, welche ohne weitere Befestigung nur in das silberne Kunststoffgehäuse eingelegt ist. Zur Front (Bedienseite des Rollos) hin wird die Platine durch LED (rot) und Microtaster (grün) in Position gehalten, auf der Rückseite des Gehäuses durch die vierpolige Buchse (blau), aus der ich weiter oben das Verbindungskabel zum Motor harausgezogen hatte. Ausfädeln der Platine erfolgt von hinten nach vorne, also zuerst die vierpolige Buchse minimal aus der Gehäuseaussparung herausheben, dann das hintere Ende der Platine seitlich herausschwenken.


Zusammenbau des Akkugehäuses
Der Zusammenbau erfolgt in der umgekehrten Reihenfolge der Zerlegung.
Beim Einfädeln der Platine zuerst die LED in die dafür vorgesehene Öffnung der Frontseite einführen, Platine dabei senkrecht ausrichten und speziell darauf achten, dass die beiden Taster von aussen einen «knackigen» Druckpunkt mit den Microtastern haben.

Dann das hintere Ende der Platine einschwenken und die Buchse in der dafür vorgesehenen Aussparung des Gehäuses versenken. Der weisse Teil der Platine (anscheinend die Antenne des Funkmoduls) muss bündig mit der Aussparung des Gehäuses (grauer Kunststoff) abschliessen.
Vor der Montage des Gehäusedeckels die Schwenkachse des Batteriefachs in die untere Gehäusebohrung stecken, Batteriefach aufstecken und schliessen. Dann den Deckel des Batteriefachs in die beiden Nuten (blau) einführen, ganz nach unten schieben und wieder mit den vier Schräubchen verschrauben. Nochmals prüfen, daß die beiden Taster immer noch einen «knackigen» Druckpunkt besitzen:

Der Antriebsmotor
Das Motorgehäuse, ein Aluminiumrohr, trägt die folgende Inschrift:

TQL25 scheint die Typbezeichnung zu sein, während die zweite Zeile die technischen Daten enthält:
- Spannungsversorgung: 7.4 Volt Gleichspannung [VDC]
- Stromaufnahme: 0.4 Ampere [A]
- Drehmoment: 0.4 Newtometer [Nm]
- Drehzahl: 25 Umdrehungen pro Minute [rpm]
- Anzahl Umdrehungen: 13 volle Umdrehungen plus 265°, also rund 13.75 Umdrehungen
Der letzte Punkt bedarf einer Erklärung, weil er nicht unmittelbar offensichtlich ist:
Erstens zähle ich etwa 15 Lagen Stoff bei einem voll aufgewickelten Rollo, von denen wegen Verklebung mit der Alurohr-Hohlachse nur etwa 14 Lagen abwickelbar sein dürften, was genügend nah an den behaupteten 13.75 Wicklungen laut Motorspec. liegt:
Und zweitens kann man mit dem Aussendurchmesser des Alurohrs von 32 mm und dem Aussendurchmesser des zu jedem Zeitpunkt unter dem Gewicht des noch nicht aufgewickelten Stofflappens gespannten, vollständig aufgewickelten Rollos von 56 mm Aussendurchmesser auf eine Materialstärke (Präziser: Radiuszuwachs = Stoffdicke plus Luftspalt) des Stoffs von ca. 0.8 mm schliessen. Mit der ersten, geklebten Stofflage erhöht sich der nutzbare Innendurchmesser auf ca. 33.6 mm. Es ergibt sich ein tatsächlicher, mittler Wicklungsdurchmesser von 44.8 mm und somit ein mittlerer Wicklungsumfang von etwa 14.1 cm. 14.1 cm mal 13.75 Wicklungen ergibt eine Wickellänge von ca. 193.5 cm, was in etwa der versprochenen Dimension für FYRTUR Rollos von 195 cm Länge entspricht.
Drittens habe ich für ein vollständiges Herunterfahren des Rollos aus seiner Top-Position 34 Sekunden gestoppt, was bis auf +1 Sekunde mit der rechnerisch erforderlichen Dauer für 13.75 Umdrehungen bei 25 Upm von 33 Sekunden übereinstimmt. Die spannende Frage im Moment ist, woher der Motor weiss, wann er von der Top-Position aus 13.75 Umdrehungen gelaufen ist. Ich komme später noch darauf zurück.
Das Motorgehäuse
Bisher sieht man nur ein Aluminiumrohr mit zwei Endkappen aus Kunststoff, wobei am dem Kabel entgegengesetzten Ende noch ein Mitnehmer zur Momentenübertragung auf die Hohlwelle des FYRTUR herausschaut. Die Kunststoffkappen werden durch eingebogene Laschen des Alurohrs in ihrer Position fixiert. Das gibt auf jeden Fall Abzüge beim Reparaturindex, denn spätestens beim zweiten Hin- und Herbiegen werden diese Laschen abbrechen. Im Moment ist mir das aber egal, denn ich will endlich wissen, was da drinnen los ist. Und für die Wissenschaft müssen gegebenenfalls Opfer gebracht werden:

Nach kurzem «Würgen» mit einem kleinen Schraubenzieher hatte ich die Laschen genügend weit aufgehebelt, daß ich das Alurohr von der Kunststoff Endkappe abstreifen konnte. Jedenfalls ein Stück weit, bis mich eine bestehende Steckverbindung mit anscheinend recht kurzem Kabel aufhielt. Bitte im folgenden Foto auch das obere Ende eines durchgehenden Metallstifts beachten (roter Pfeil). Der eingeschobene Schraubendreher dient nur dazu, fürs Foto zu verhindern, daß die elastischen Krümmungen des Kabels die Platine zurück ins Rohr ziehen:

Die nicht weiter gesicherte Steckverbindung ist schnell gelöst. Der durchgehende Metallstift sichert die axiale Einstecktiefe der Platine in die weisse Kunststoff Endkappe:


Schliesslich ist die Platine vollends befreit und präsentiert sich in voller Schönheit. Die Draufsicht habe ich absichtlich aus schrägem Winkel fotographiert, damit trotz Blitz zumindestens einige Chip-Beschriftungen lesbar bleiben:


Die Elektroniker und Hardcore-Hacker unter den Lesern wird möglicherweise interessieren, daß die in der Mitte oben auf der Oberseite weiss umrahmten fünf freien Lötpunkte mit Beschriftung «IO1«eine Schnittstelle zum Auslesen bestehender, sowie zum Aufspielen alternativer Firmware bilden. Auf GitHub gibt es dazu mindestens ein interessantes Projekt, in dem jemand die existierende Firmware reverse engineered hat und die Erstellung eigener Custom-Firmwares dokumentiert.
Nun bin ich immerhin so weit, daß vier eingehende Leiter in dieser Platine in zwei ausgehende Leiter gewandelt werden. Den Motor habe ich immer noch nicht in der Hand. Also die gleiche Übung (Laschen aufstemmen) auch noch am anderen Ende des Alurohrs:

Inzwischen habe ich ein wenig Routine darin, und nach kurzer Zeit ist der Motor mitsamt Anbauteilen freigelegt:



Das aufgesteckte weisse Kunststoffteil am linken Ende des Motors hat die Doppelfunktion der Zentrierung des dünneren Motors im weiteren Rohr, sowie der integrierten Kabelführung durch ein im Rohr verbliebenes «Schott».

Das Getriebe (blass-gelblicher Kunststoffzylinder) ist auf den Adapter am rechten Motorende aufgeklipst. Mit einem Schraubendreher habe ich in einer Kombination aus Aufhebeln der äusseren, zum Getriebegehäuse gehörenden Laschen und Niederdrücken der motorseitigen Zungen Motor und Getriebe voneinander getrennt. In diesem Schritt auf den kleinen weissen Kunststoffring achten! Hierbei handelt es sich um eine torsionssteife Kupplung zwischen dem Ausgangs-Wellenstumpf des Motors und dem Eingangs-Wellenstumpf des Getriebes. Sollte dieses kleine Teil abspringen: es ist nicht symmetrisch und kann nur in einer Orientierung montiert werden: Die Motorwelle hat einen Durchmesser von 2.0 mm, während die Getriebeeingangswelle einen Durchmesser von 2.6 mm aufweist. Beide Wellenstümpfe sind abgeflacht – das Moment wird formschlüssig übertragen, nicht durch Klemmung.

Den Motor konnte ich nun am Wellenstumpf der Kabelseite mühelos zwischen zwei Fingern durchdrehen. Das Getriebe mit aufgestecktem Mitnehmer jedoch nur unter nennenswertem Kraftaufwand. Immerhin war nichts «echt» blockiert.
Der ursprünglich mit dem FYRTUR ausgelieferte Motor ist vom Typ BCR-2238 von der chinesischen Firma Bosheng Motors:

Leider liefert die Webseite des Herstellers keine weiteren Informationen zum Motor, und mein chinesisch ist zu sehr eingerostet als daß ich mich mit dem ChatBot hätte verständigen können. Meine auf englisch eingegebene Frage, ob man in englischer Sprache kommunizieren könne, blieb leider unbeantwortet. Ich interpretiere das als «Nein».
Update 27.01.2026: ein evtl. Ersatzmotor müsste zumindest mechanisch kompatibel sein, also hinsichtlich Durchmesser, Länge, Dimensionen Wellenstümpfe etc. mit dem zu ersetzenden Motor übereinstimmen. Hier die vorgefundenen Dimensionen:
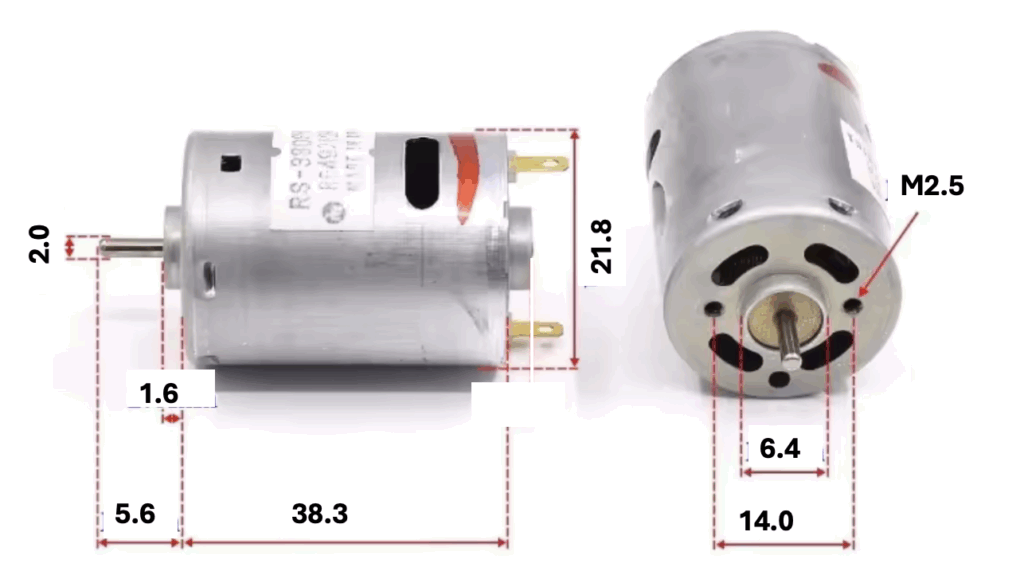
Update 01.04.2026 zur elektro-magnetischen Kompatibilität: Der Motor enthält einen 3-poligen Anker mit ø15.04 mm, Länge Blechpaket 21.5 mm, reine Achslänge 50.5 mm, Achstummel beidseitig ø2.0 mm und D-förmig abgeflacht, Länge Achstummel abtriebsseitig ab axialer Anlagefläche 6.6 mm, Länge Achstummel ab axialer Anlagefläche Kollektor 8.3 mm. Jeder «Zahn» des 3-poligen Ankers ist mit 107 Windungen Kupferdraht ø0.22 mm umwickelt.

Das schwach durchscheinende Getriebegehäuse lässt erahnen, daß im Inneren ein mehrstufiges Planetengetriebe am Werk ist, dessen Übersetzungsverhältnis ich im hohen zwei- bis niedrigen dreistelligen Bereich verorten würde. Ich habe das nicht nachgezählt und zudem keine Möglichkeit gesehen, das Getriebe zerstörungsfrei selbst zu öffnen um Zähne zu zählen. Auch weist das Getriebe keine erkennbare Typbezeichnung auf.
Update am 01.04.2026: inzwischen habe ich mein letztes Exemplar eines FYRTUR geopfert (meine derzeitige Mietwohnung hat allseitig aussenliegende Lamellenstoren) und auch das Getriebe geöffnet. Dabei war garnicht einmal viel an «Zerstörung» nötig: der Metallring am Abtriebs-seitigen Ende des Getriebes ist festgeklebt und kann mittels eine Zange mit parallel spannenden Backen zum Abtriebsende hin abgestreift werden. Dabei kommt ein dreistufiges Planetengetriebe zum Vorschein, mit den ersten beiden Stufen (von der Antriebsseite aus gesehen) in reiner Kunststoffausführung, und der dritten Stufe mit Zahnrädern aus Metall und auch metallenen Achsen des Planetenrad-Trägers dieser Stufe. Nach Zählen der beteiligten Zähne ergibt sich das folgende Bild:
Hohlrad im Getriebegehäuse (für alle Getriebestufen gleich): 45 z
- Sonnerad 1. Stufe: 9 z
- Planetenräder (3 Stück) der ersten Stufe: 17 z
- Sonnerad 2. Stufe: 12 z
- Planetenräder (3 Stück) der zweiten Stufe: 15 z
- Sonnerad 3. Stufe: 9 z
- Planetenräder (3 Stück) der dritten Stufe: 17 z
Insgesamt komme ich auf eine Gesamtuntersetzung Antrieb => Abtrieb von 93.75 : 1, also garnicht einmal so schlecht geschätzt.
Jedenfalls erscheint es mir einleuchtend, daß ein manueller Antrieb am ausgangsseitigen Mitnehmer dieses Getriebes zu einer entsprechend ca. hunderfachen Verdrehung der Getriebeeingangswelle führen müsste. Der mechanische Widerstand bei meinem manuellen Getriebe-Funktionstest war insofern erklärbar. Umgekehrt war nun zu erwarten, daß ein Antrieb des Getriebes an seiner Eingangswelle auf kaum einen spürbaren Widerstand treffen dürfte. Also habe ich Motor und Getriebe wieder zusammengeclipst. Während des Klipsens durch gleichmäßiges Verdrehen des kabelseitigen Motorwellenstumpfs sicherstellen, daß die abgeflachte motorseitige Öffnung der Wellenkupplung sich sauber auf den abgeflachten Wellenstumpf der Getriebeeingangswelle aufschiebt. Anschliessend konnte ich immer noch den Motor am Wellenstumpf der Kabelseite mühelos zwischen zwei Fingern durchdrehen.
Einen Motor oder ein Getriebe mit den Fingern zu verdrehen ist auf die Dauer sinnfrei. Aber ich hatte ja einen exakt passenden, frisch aufgeladenen Akku zur Verfügung. Mit zwei kurzen, beidseitig verzinnten Käbelchen habe ich dann in einem fliegenden Aufbau verifiziert, daß das Motörchen mit aufgeklipstem Getriebe wunderbar frei sirrt, wenn es mit Akku verbunden ist.

Vertauschen der Kabel führt erwartungsgemäß zur Drehrichtungsumkehr. Also alles gut soweit! Ich habe die Kombination in jeder Drehrichtung mindestens eine Minute lang laufen gelassen und keine Anzeichen dafür gefunden, daß irgendein Endanschlag erreicht wird.
Hier noch die Video-Dokumentation der ersten Stufe eines Integrationstests: Motor plus Getriebe:
Nachdem dieser Integrationstest zur Zufriedenheit verlaufen war, blieb mir nichts weiter, als alles wieder zusammenzubauen.
Zusammenbau der Antriebseinheit
Der Zusammenbau erfolgt in der umgekehrten Reihenfolge der Zerlegung.
Aufgepasst: Beim Zurückbiegen der aufgestemmten Laschen des Alurohrs unbedingt darauf achten, daß wirklich nichts über den Aussendurchmesser des Alurohrs hinausragt. Anderenfalls kann es zu Störungen kommen, die von Schleifen zwischen Motorgehäuse und den Innenrippen der rotierenden Rollo-Hohlwelle (mit entsprechender Geräuschentwicklung) bis hin zu mechanischer Blockade reichen. Um die wirklich vollständige Versenkung der Laschen zu erreichen, habe ich die nach dem Zurückbiegen noch vorhandenen Überstände auf meiner glasharten Schreibtischoberfläche regelrecht «eingewalzt».
Inzwischen ist alles wieder vollständig zusammengebaut. Das FYRTUR verrichtet seinen Dienst, als ob es nie etwas anderes getan hätte.
Unbefriedigend bleibt, daß ich keinen Fehler finden und beheben konnte und es nun trotzdem wieder funktioniert. OK, besser als umgekehrt …
UPDATE vom 30.06.2025 und vom 27.01.2026 am Ende dieses Artikels bitte beachten. Inzwischen gibt es weitere Erkenntnisse!
Positionierung bzw. Kalibrierung
An der Frage, wie die obere und untere Endlage erkannt werden, scheiden sich die Geister.
Meine Theorie hierzu: Die Erkennung der oberen Endlage des FYRTUR Rollos erfolgt meiner Ansicht nach durch Auswertung des Stromanstiegs beim Erreichen des mechanischen Anschlags. Bei mechanischer Blockade der Drehbewegung wirkt der Motor wie ein Kurzschlussleiter, mit entsprechendem Stromanstieg, welcher durch eine geeignete Elektronik ausgewertet werden kann.

Der spannendere Fall ist die Erkennung der unteren Endlage. Hier gibt es offensichtlich keinen mechanischen Anschlag. Ohne Erkennung der unteren Maximalposition würde die Antriebswelle weiterlaufen und das Rollo «anders herum» wieder aufwickeln, bis erneut die Top-Position erreicht wäre. Abgesehen von einem möglichen Knittern des Rollos und einem möglichen Abschälen der Verklebung wäre die Funktion des Rollos nicht erfüllt.
@mjuhanne, vor dessen Arbeit ich im übrigen großen Respekt habe, beschreibt in seinem GitHub-Projekt, daß die Erkennung der oberen Endlage anhand des Ausbleibens (stall) der Signale des in den Motor integrierten Hall-Sensors erfolgt. Dabei ist er seriös genug einzuräumen, daß er sich dessen nicht völlig sicher ist:
Regarding the maximum current limit feature in this firmware, it was designed to be an extra layer of safety in addition to the fuse on the custom (NOT ORIGINAL!) Fyrtur board. The main method of stall detection is via timeout of signals from the Hall sensors. This is also the way the original firmware works as far as I know. In my reverse engineering project of the original Ikea motor firmware I didn’t find any evidence that the current sensing circuitry would be used for stall detection (take this with a grain of salt – it’s possible that I have overlooked this part of the code). So it seems that even Ikea (or the subcontractor that manufactured the motor module) didn’t bother to use the current sensing circuitry even though the hardware is there.
https://github.com/mjuhanne/fyrtur-motor-board#ikea-fyrtur-roller-blind-motor-unit-custom-firmware
Ich habe an dieser Einordnung aus mehreren Gründen Zweifel. Während meiner Recherche bezüglich Gleichstrommotoren mit integriertem Hall-Sensor
- waren alle Beispielmotoren mit mehr als zwei Leitern angeschlossen, während der Antriebsmotor des FYRTUR mit nur exakt zwei Leitern verbunden ist.
- lagen fast alle Beispielmotoren mit integriertem Hall-Sensor preislich oberhalb des Preises eines kompletten FYRTUR-Neugeräts inkl. Akku, Ladegerät, Fernbedienung, Rollo.
Trotzdem lässt sich nicht bestreiten, daß gleiche FYRTUR Antriebseinheiten trotz unterschiedlicher Last (in verschieden breiten FYRTUR Rollos) den beworbenen Hub von 195 cm mehr oder minder exakt einhalten und in der unteren Endlage zuverlässig stoppen. Es muss also eine Art lastunabhängige Rückkoplung der Anzahl der Motorumdrehungen an die Steuerungseinheit geben.
Meine diesbezügliche Recherche führte mich auf die sensorlose Methode der Positionsbestimmung mithilfe des Ripple Counting (Wellenberg-Zählung):

Das Prinzip beruht darauf, daß bei Gleichstrom-Bürstenmotoren die Stromaufnahme im Kollektor periodisch unterbrochen und wiederhergestellt wird, und zwar bei jedem Wechsel von einem Pol zum nächsten. Diese Welligkeit der Stromaufnahme (im obigen Bild die blaue Kurve) kann elektronisch in ein zählbares Rechtecksignal ausgewertet werden und liefert so auch bei einer Zweidraht-Ansteuerung eines Motors das benötigte Feedback für eine präzise und lastunabhängige Positionsbestimmung.
Ob dies beim FYRTUR zur Anwendung kommt, kann ich nicht beurteilen. Aber diese Methode ist derzeit mein Favorit, weil sie nicht im Widerspruch zu bisher gemachten Beobachtungen steht.
Weiterführende Links zum Ripple Counting:
- https://e2e.ti.com/blogs_/b/analogwire/posts/motor-driven-automation-in-smart-home-systems-how-to-achieve-efficiency-and-cost-savings
- https://ww1.microchip.com/downloads/en/Appnotes/Sensorless-Position-Control-of-Brushed-DC-Motor-Using-Ripple-Counting-Technique-00003049A.pdf
- https://patents.google.com/patent/EP2109211A1/en
Update am 30.06.2025:
Leser Alex awflett@mac.com (siehe Kommentarbereich) hat die Zerlegung der Einheit dankenswerterweise noch einen Schritt weiter getrieben und auch den Motor selbst geöffnet. Die folgenden Bilder hat er mir freundlicherweise zur Verfügung gestellt:


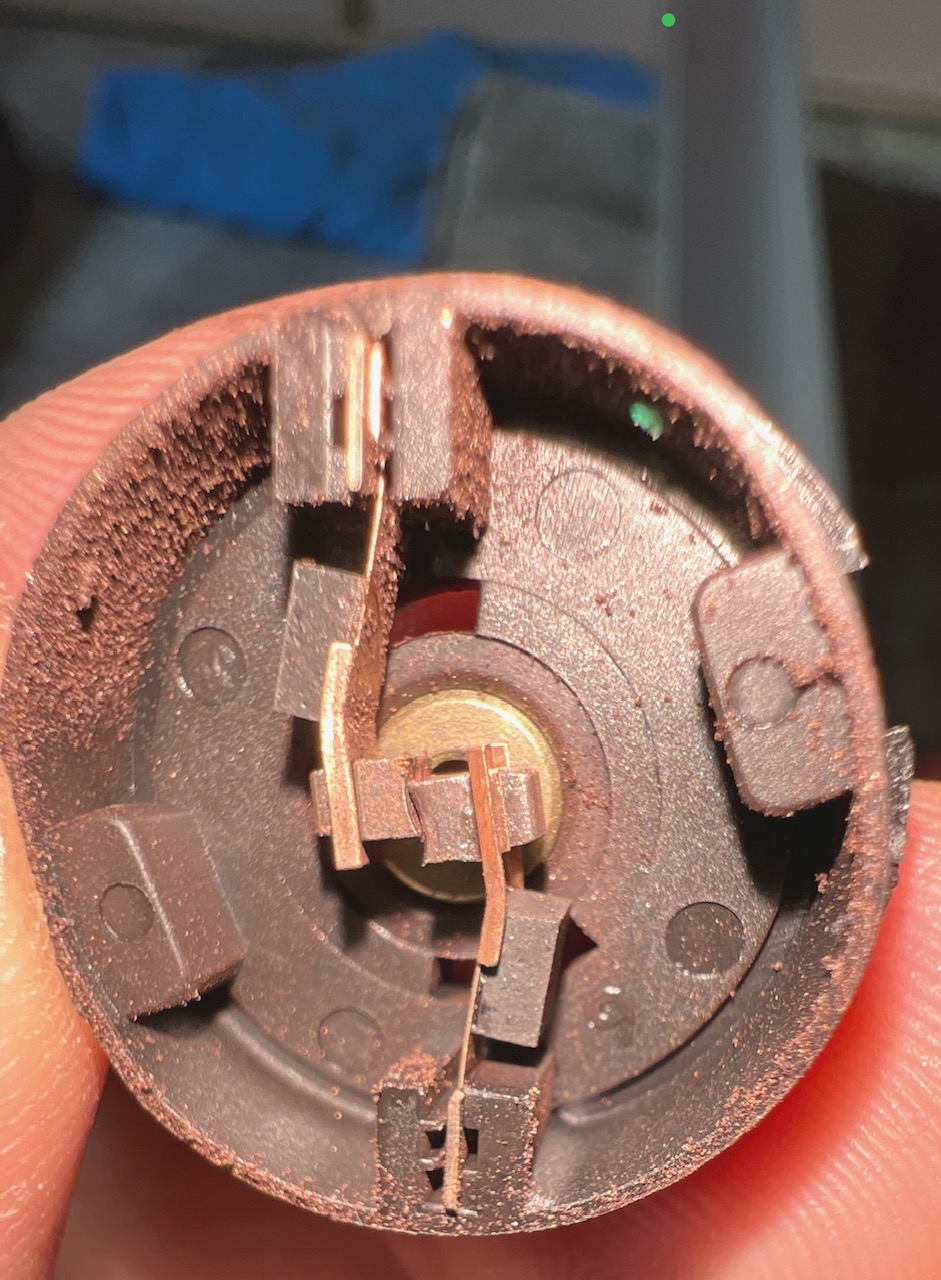

Auffallend ist der massive Abrieb vom Kollektor des Ankers, der sich grossräumig im Inneren des Motors verteilt hat. Ein Abrieb, dessen Konsistenz ich weniger als «Staub», sondern vielmehr als regelrechte «Späne» bezeichnen würde. Eigentlich sollten die «Bürsten» bzw. «Kohlen» aus Graphit bestehen und extrem reibungsarm auf den Kontaktflächen des Kollektors gleiten. Dem Schadensbild nach zu urteilen sind die angeblichen «Kohlen» (Bild unten links) jedoch wesentlich härter als die kupfernen Kontaktflächen des Kollektors. Ein Umstand, welcher eine extrem endliche Lebensdauer des Motors quasi garantiert 😳
Alex berichtet hierzu, dass sein gegenständliches FYRTUR seit vier Jahren im ununterbrochenen Betrieb ist, mit täglich einem (1) Auf- und Ab-Hub, sowie an sehr sonnigen Sommertagen auch einmal zwei täglichen Hüben.
Wenn man die deutlich sichtbare, quasi eingefräste Stufe im Kollektor (Bild oben links) als Massstab nimmt, dürfte dieses Exemplar im Kriterium «Kollektorverschleiss» unnötigerweise bereits etwa die Hälfte seiner Lebensdauer erreicht haben.
Dies ist insgesamt umso ärgerlicher, als dass der Motor vermutlich lediglich zu etwa 5% an den Gesamtkosten eines FYRTUR beteiligt sein dürfte, jedoch zu 100% an dessen Ausfällen.
Betroffenen kann ich empfehlen, den Motor zu öffnen, und allen vorhandenen Abrieb sorgfältig mittels Ausblasen (Druckluft) und/oder Abbürsten mittels einer harten Zündkerzenbürste zu entfernen, insbesondere im Bereich des (nur dreipoligen!) Kollektors. Etwaige dort verbleibende Kupferspäne können ansonsten zu einem Kurzschluss zwischen benachbarten Lamellen des Kollektors führen, welcher den Motor (und das gesamte FYRTUR) am Wiederanlaufen hindern würde = Totalschaden.
Als ultimative Massnahme käme ein Ersatz des Motors vom Typ BCR2238 von Bosheng Motor, China in Frage. Mechanische Abmessungen siehe hier.
Wow, ich bin sprachlos. Nachdem ich auf Grund der vielen Ausfälle dieses Rollotyps herausfinden wollte, was es damit auf sich hat und ein paer diesbezüglich nutzlose Videoa angeschaut habe, bin ich auf diese Seite gestoßen.
Meinen absoluten Respekt und vielen Dank für diesen fundierten und akkurat bebildert und geschriebenen Beitrag. Dass es hier ^nach 247 Views noch keinen einzigen Beitrag gibt hat mich sehr verwundert. Da sich auf der IKEA Seite die negativen Kritiken über die Ausfälle in letzter Zeit gehäuft haben, dürften in Zukunft vielleicht vermehrt Leute auf diese Seite stoßen.
Nur schade, dass die Ursache für den Ausfall nicht diagnostiziert werden konnte.
Hallo Jojo,
ich habe diesem Artikel bereits viele Worte gewidmet, und trotzdem oder gerade deswegen hinterlässt er Dich sprachlos … (ich interpretiere das als Lob – vielen Dank). Ich denke nicht, dass mehr Worte die Sache verbessern. Hoffentlich findest Du Deine Sprache wieder … 😉
Chris
Hallo,
vielen Dank für die Inspiration. Ich habe damit 2 Rollos wieder gängig gemacht. Ich glaube es liegt schlicht an den Kohlebürsten – am Abrieb (irgendwas in der Ecke).
Bei einem Versuchsaufbau brauchte der Motor bei weniger als 3Volt bereits 700mA Strom. Eine höhere Spannung habe ich mich zu dem Zeitpunkt nicht mehr getraut. Eine Reinigung dieser Teile hat bei mir geholfen. Fetten hat nichts gebracht. Dannach war der Verbrauch bei 7V deutlich geringer.
Mir ist aufgefallen das meine Rollos an der Ikea Zigbee Bridge beide innerhalb eines Monats hintereinander ausgefallen sind. Im Wohnzimmer sind 5 Rollos aktuell nicht ausgefallen. Aber auch 3 Monate jünger. Diese sind in einem anderen Zigbee Netz angemeldet. Dort fahre ich Positionen ab zwischen 0 und 100. Manchmal bleibt so ein Rollo evtl. hängen und fährt danach unkalibriert weiter bis ich es per Knopfdruck am Rollo manuell einfahre.
Die Ikea Bridge zieht die Rollos bis ganz oben ein was man auch hören kann. Ich glaube über die States: OPEN, CLOSE. Der Motor wird hier deutlich belastet bis er sich absschaltet. Dafür hängen die Rollos nie in einem falschen Zustand fest. Ich vermute damit kalibrieren die Rollos ihre 0 Position. Auf Kosten eines Stromanstieges und höheren Verschleiß.
Noch ein Hinweis: Der Hallsensor befindet sich auf der Rückseite der Achse des Motors. Entfernt man den Motor mehr als 2 CM von der Platine mit den Hallsensoren stoppt das Rollo. Ohne Stromanstieg dreht der Motor so lange bis die Batterie leer ist. Ich vermute damit das der Stromanstieg gemessen wird um die 0 Position zu bestimmen wenn der State CLOSED gesendet wird. Ansonsten zählt das Rollo die Magnetfeldwechselzyklen mehr oder weniger genau.
Viele Grüße
Hallo Florian,
schönes Feedback. Und freut mich, wenn Du Nutzen aus meinem Beitrag ziehen konntest. Weiterhin viel ungetrübten Spass mit IKEA® FYRTUR!
Ich bin absolut begeistert von so einem Enthusiasmus. Meinem Rollo ist gleiches passiert und ich bin beim googeln auf diese Seite gestossen. Leider fehlen
mir die technischen Fähigkeiten um das alles nachzuvollziehen und ich frag mich bestelle ich einfach ein neues Rollo 😉 Wenn ich nicht gleich 5 Stück von denen nebeneinander hängen hätte, würde ich mich vermutlich gleich nach einem anderem Hersteller umsehen. Auch mit der Bridge viele Probleme.
Freut mich wenn ich mit meinem Enthusiasmus Andere anstecken kann.
Jaja, der Vendor-Lockin …
Das Zerlegen war ja nicht immens komplex, und ist meiner Meinung nach ausführlich beschrieben. Einen Versuch, die Zerlegung und den Wieder-Zusammenbau zu probieren wäre es mir wert. So gibt es für Dich die Chance, etwas dabei zu lernen. Du hast ja nichts zu verlieren sondern wirst in jedem Fall gewinnen: ein wieder funktionierendes Rollo, oder wenigstens etwas Erfahrung im Umgang mit Werkzeugen.
Nochmal gegoogelt und wie es aussieht gibt es ja in Deutschland tatsächlich 5 Jahre Garantie auf das Teil. Ärgert mich masslos, dass die Schweiz mal wieder nicht mit macht und uns an der Nase rum führt. Habe telefoniert mit denen. Ich bin 3 Monate über den bei uns geltenden 2 Jahren Garantie.
«Tut uns leid, aber leider Pech gehabt» Wir sind aber in guter Gesellschaft wenn man sich ein wenig umsieht im Netz.
https://www.ikea.com/de/de/files/pdf/a4/5e/a45e2ce0/fyrtur-kadrilj-rollo-garantie_082021.pdf
Klaus,
klar sind fünf Jahre Garantie besser als nur deren zwei. Andererseits hat meiner Meinung nach die EU mehr Grund, auf die Schweiz neidisch zu sein als umgekehrt. Ich für meinen Teil bin jedenfalls froh, dass die Schweiz nicht jede Dummheit (und Schlimmeres!) der EU kopiert, und sich einen Teil ihrer Unabhängigkeit nicht nehmen lässt. Was die kürzere Garantiespanne der Schweiz angeht, habe ich ja im vorliegenden Fall (IKEA FYRTUR) demonstriert, dass man nicht in jedem Fall darauf angewiesen ist – wenn man bereit ist, auch einmal die Ärmel hochzukrempeln und ein paar (wenige) Werkzeuge anzufassen.In diesem Sinne:
… und abschliessend nochmal vielen Dank für die Aufmunterung und Vorgehensweise. Ein paar Wochen später habe ich mir tatsächlich mal die Zeit genommen und nach Deinem Plan das Gerät geöffnet. Nicht nur einmal, nicht zweimal, sondern erst im vierten Anlauf hat sich der Antrieb wieder bewegt 😉 Ich hatte erst keinen Draht zur Hand, habe aber gemerkt, dass weder Motor noch Getriebe blockiert waren. Dachte vielleicht reicht es ja auch wenn ich manuell ein wenig drehe. Hat aber nichts gebracht. Also Kabel gesucht, angeschlossen und siehe da … Motor läuft. Wieder zusammen gebaut … Motor läuft nicht mehr. Bei dritten Mal das gleiche. Man konnte immer den Impuls spüren, aber keinen Millimeter Bewegung. Nochmal auseinander, also eigentlich nur die 2 Platinen überbrückt und den Motor länger laufen lassen. Sowohl links als auch rechts herum. Das Ende vom Lied, Rollo funktioniert wieder einwandfrei… Tröörööö….
Klaus, Freut mich sehr. Geschichten von einem Happy End höre ich immer gerne. Ich frage mich nur, wie Du die verstemmten Laschen im Rohr mehrfach auf- und wieder zubiegen konntest ohne dass sie abgebrochen sind.
hab nichts spezielles gemacht und mir nicht viel dabei gedacht und einfach vor und zurück gebogen 😉
Jetzt aber wirklich abschließend 😉 war ein kurzes Vergnügen insgesamt. War zwischenzeitlich schon wieder fest, so dass ich es aufmachen musste und nun schon wieder. Werde mich nach einem anderen Motor umsehen den ich verbauen kann oder ein gebrauchtes Rollo kaufen aus Deutschland was noch Garantie hat. Und zwar die 5 Jahre 😁.liesst man die Kommentare hier https://m.youtube.com/watch?v=9LDzO80-gGs&noapp=1 dann wird klar dass die Dinger Schrott sind.
wow, eine mega detailierte Teardown Beschreibung! Habe mein Rollo auch zerlegt und wieder zusammenbekommen. Danach lief es kurz (wie bei Dir) aber jetzt zickt (Zigbee 🙂 ) es wieder..
Ich steuere mit Zigbee2Mqtt über Homeassistant anstelle Ikea Home & Smart App.
Hast Du versucht, es ganz old-school via den mitgelieferten Handfernbedienungen laufen zu lassen? Oder noch einfacher: über die beiden Tasten links neben dem Batteriefach? Wenn das ginge, könnte man ein mechanisches Problem ausschliessen.
Ja, geht leider auch nicht. Es wird etwas mechanisches sein. ;Manchmla zuckt der Motor ganz leicht aber dreht nicht wenn das Rollo zusammengebaut ist. Vielleicht is es ja die von Dir beschriebene Endabschaltung über die erhöhte Stromaufnahme wenn das Rollo etwas schwergängig ist!? meine anderen Rollos lassen sich von Hand viel leichter drehen.
..aber good news! Ikea hat mein 4,5 Jahre altes Rollo heute umgetauscht :-). Hurra!
Ein hoch auf die EU und die 5 Jahre Garantie. Ich glaube nur Schweizer wissen warum sie das doof finden. Hoffentlich setzt die EU-Richtlinie auch bei Akkus den USB-C als Standard durch, wird langsam Zeit das Mikro-USB stirbt!
Jan, wegen des Seitenhiebs auf «die Schweizer»:
Mikro-Optimierungen mitzunehmen und sich dabei Makro-Verschlechterungen einzufangen, das scheint eine Spezialität der EU-Bürger zu sein.
SCNR
Danke für die ausgezeichnete Beschreibung!
Ich habe gerade genau das gleiche Problem und werde mit Deinen Hinweisen versuchen, das dumme Teil wieder zum laufen zu bringen (Allerdings wird das vermutlich nur ein zeitlich begrenztes Vergnügen sein, fürchte ich).
Danke nochmals und viele Grüße, -peter
Das ist doch mal eine echt gelungende Doku. Danke dafür
Hallo, habe mir gestern spontan auch zwei Rollos gekauft. Auch mir hat sich die Frage gestellt, ob die sich verlängern lassen resp. ein anderer länger Stoff sich montieren lässt.
Hier hatte sich doch die Frage gestellt, wie die Steuerung den ausgefahrenen Endanschlag erkennt. Folgende Theorie: Bisherige Theorien viel zu kompliziert gedacht. Der Motor erkennt beim einfahren den mech. Endanschlag. Daher weiß er, wieviele Umdrehungen er zurückgelegt hat. Die zählt er beim ausfahren ab und stoppt danach. Würde heißen, bei der Herstellung, wie der Stoff angeklebt, anschließend wird aufgewickelt und daher kennt die Steuerung den Endanschlag. Hat jemand mal getestet, ob der Motor weiterdrehen würde, wenn die Aluschiene am Schluss nicht da wäre?
Christian, danke für Dein feedback.
Ich denke, der Schlüssel zu Deiner Frage liegt in der Kombination von Motor (siehe Foto von dessen Beschriftung oben im Artikel: 13 + 265°) und zugehöriger Elektronik. Wenn in Kombination der beiden exakt 13 Umdrehungen + 265° gewickelt werden, benötigst Du für einen längeren Stoff eine dickere Trommel, oder eine geänderte Firmware für die Antriebseinheit.Bei einer dickeren Trommel dürftest Du bei der gegebenen Halterung schnell an mechanische Grenzen gelangen.
Ich bleibe jedenfalls – bis jemand eine überzeugende Alternative präsentiert – bei meiner Bevorzugung der Theorie für die Erkennung der Top-Lage durch Stromanstieg bei der mechanischen Blockade durch die abschliessende Aluschiene. Und überzeugen könnte eine derartige alternative Theorie nur, wenn sie nicht in Widerspruch zu gemachten Beobachtungen steht.
Ich stelle mir das aus Herstellersicht vor. Der einfachste Montageprozess, wäre wie beschrieben, Stoff ankleben, einfahren lassen, dadurch Motor programmiert. Vielleicht dient der Aufdruck auf dem Trommelmotor auch nur der Identifizierung während des Montageprozesses. Es gibt ja noch andere Varianten. Alles andere wäre für eine kosteneffiziente Produktion, viel zu kompliziert!? Und ich glaube nicht, das in einem Werk in Taiwan erst der Stoff aufgeklebt wird und anschließend wird erst programmiert. Zumal man im montierten Zustand an keine Programmierschnittstelle mehr kommt. Ich werde es bei Gelegenheit testen.
Eine Kalibrierung, welche nur beim Hersteller erfolgen kann, wird auf die Dauer immer einer Kalibrierung unterlegen sein, die beliebig oft beim Endanwender nachgefahren werden kann. Ich rede hier von der Top-Position. Von da ausgehend wird die Bottom-Position per Zählung des Verdrehwinkels angefahren, vorliegend = 13 volle Umdrehungen + 265°. Aber ich finde es gut, wenn Du weiterführende Experimente durchführst und von deren Ergebnissen berichtest.
Hi Chris, thank you for your detailed article on these blinds. This is quite an old article now, but with luck, you are still monitoring it! We invested in these blinds a few years ago (both KADRILJ and FYRTUR) and we have around 9 of them. We have had 2 failures, one that is currently failing and one which occasionally does odd things which I am monitoring. We use Home Assistant to control these with scripts to close and open at certain and to light levels using a light level sensor. It usually works quite well. For the first two, ramdomly, with no warning they just stopped and the obvious thing is that the motor/mechanism has seized up as, unlike a working/new blind, you cannot turn the blind manually or it is very hard to. Thankfully, in the UK, IKEA are very good about replacing failures for quite some time after purchase without question. However, I believe both of these units are now being discontinued so replacing them will no longer be an option. So, for the currently failing one, I have dissasembled as per above. Driving the motor direcly with the battery works and when put together, the blind ran again, apparently without issue for a week but then failed again. What is obvious is that again its very difficult to turn the motor/gear unit. I came up with a theory that when fully open the gear set is held in a ’stressed‘ position, so all of my scripts now take the blinds to 1 and 99% rather than full open and closed. As you will be aware closed position is set by the user during set up but up seems to be the calibration point for these blinds as the blinds don’t stop until they experience resistance. What I find is over a good few weeks some of the blinds slowly get lower by a few cm and start to rest on the window ledge. It was in my mind to do a calibration script to run them to full open for a few seconds each week to fix this. However, this doesn’t seem to have stopped the current blind from failing. The Chinese company you mention seems to sell their motors on ‚1688 dot com‘ but I cannot find the exact model and am unsure if any of the others are possible. Of course it could be the gear set. My gut feeling is that the blind driver looks for resistance and when it encounters it, it stops the blind. The blind that I am monitoring seems to fail in that it thinks it has reached the top position (but it hasn’t by far)- the next down signal causes the blind to overshoot such as it rolls up the front instead. This blind can normally be fixed by sending it multiple UP requests until it reaches the top. After this it knows where it is again. I probably need to take appart a working blind and dissasemble the motor/gear assembly more to figure out some more. I’m afraid before long all of the blinds will be useless.
Hi Alex, thanks for your detailed report.
That’s the spirit! Observe a phenomenon, think about it, develop a hypothesis and test that against reality. Very good!
Then comes the time to re-assess the hypothesis. In light of your new observation it seems like you deprived the unit of its expected re-calibration of the «fully up» state on every up-cycle, which would account for the «creep» of final position.
Sadly, noone has of yet fully dismantled the motor, too, to finally come down to the ultimate failure mechanism. Wouldn’t that be something for you do, before you finally dump a unit to the trash? I’d be happy to read of a real «Happy End»
Best, Chris
Hello Chris, I thought you may like an update. I managed to dismantle a couple of my blind motors. I have taken some pictures of the inside of the motors and would be happy to share these. Having little experience with the inside of a DC motor, I’m unsure if what I found is of any relevance. However, I did find that there was considerable metal dust within the motor itself. The brushes looked fairly sound to me, at least. Cleaning this out and reassembling has fixed one of the blinds, and it has been stable for a week. However, somewhat bizarrely, the other blind I have reassembled now only goes up and not down. Another interesting discovery is a custom firmware (mjuhanne/fyrtur-motor-board) for the motor board. It requires some disassembly (to the extent of the board which slots into the motor/gear unit), and the readme seems to reference the common fault of these blinds when they experience resistance. I may try flashing the board! Kind regards, Alex.
Hi Alex, I’m delighted to hear you’re still hanging in there and pushing the boundaries! I’d be happy to publish some of your pictures of the inside of those pesky motors. Alternatively, if you have a platform of your own where you publish your findings, I’d be just as happy to link to your site. Just email me at chris@vielzutun.ch , and I’ll be happy to amend my report.
Thanks and best, Chris
Was für eine schöne Erklärung, um zu einer Problemstellung zu gelangen. Ich habe alles verfolgt, aber leider ist bei mir die Kohlebürste abgebrochen. Es muss also ein neuer Motor her. Aber ich kann den Motor im Internet nicht finden. Der angegebene Link funktioniert in den Niederlanden nicht. Hat jemand eine Idee, wo ich den Motor bestellen kann?
Mich hat das Problem heute auch ereilt. Nach dem Zerlegen und erster Ratlosigkeit, bin ich jetzt der root cause auf sie Schliche gekommen.
Das Problem ist, dass auf der inneren Platine 2 Hall Geber sind (S360S). Der Magnet sitzt auf der Motorwelle auf der innenseite. Der ist zumal recht locker auf die Achse gesteckt und dann sind da noch 2 Platikbauteile dawischen. Ich denke das hat sich mit der Zeit lose geruckelt und somit saß die Platine nicht mehr direkt unter dem Magneten und die Impulse konnten nicht mehr gezählt werden. Alles wieder richtig positioniert geht es wieder.
Vielen Dank für Dein Feedback! Ich habe Deine Aussage nachgeprüft und kann Dir nur recht geben! Am motorseitigen Kopfende der Steuerplatine …
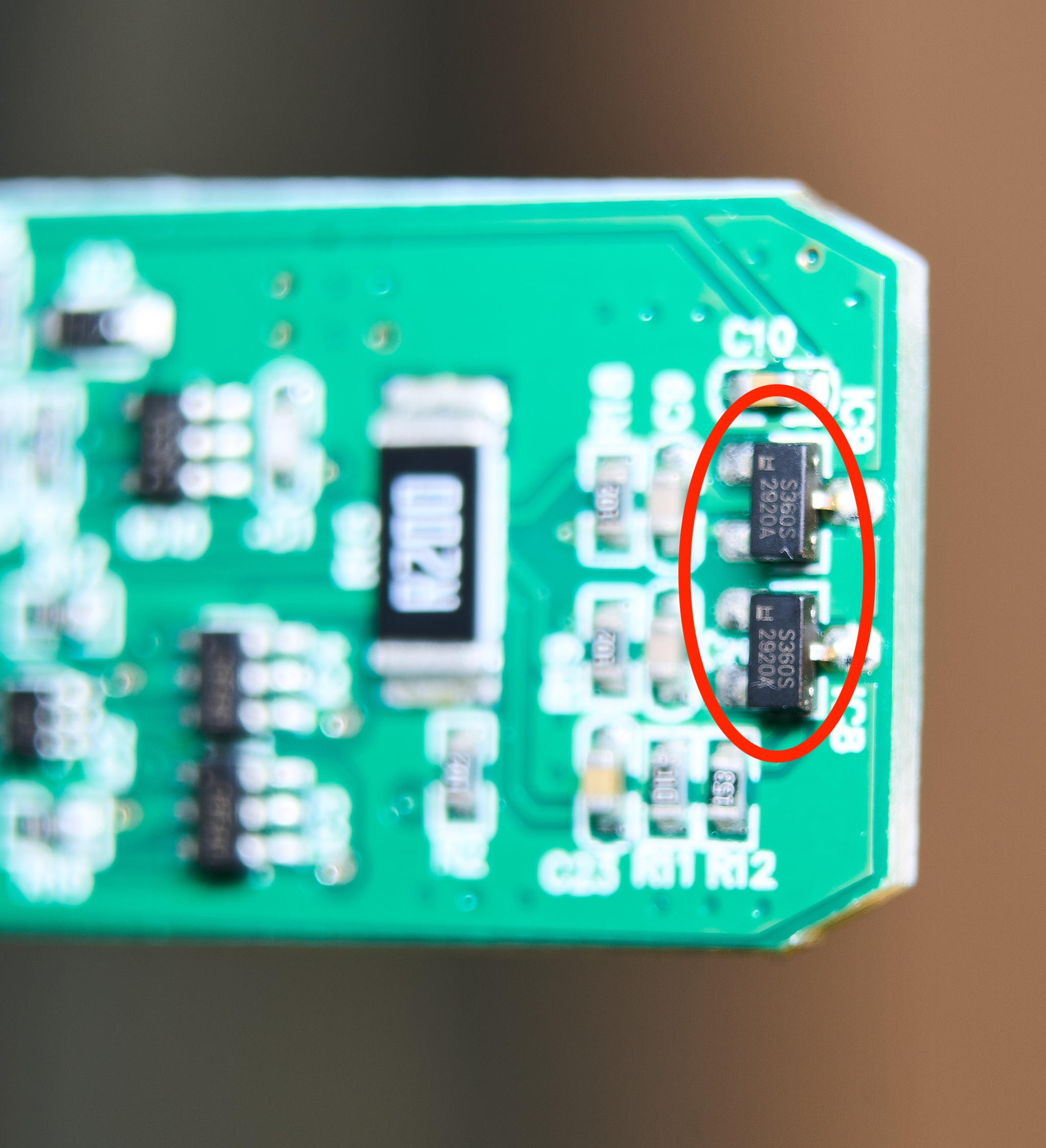
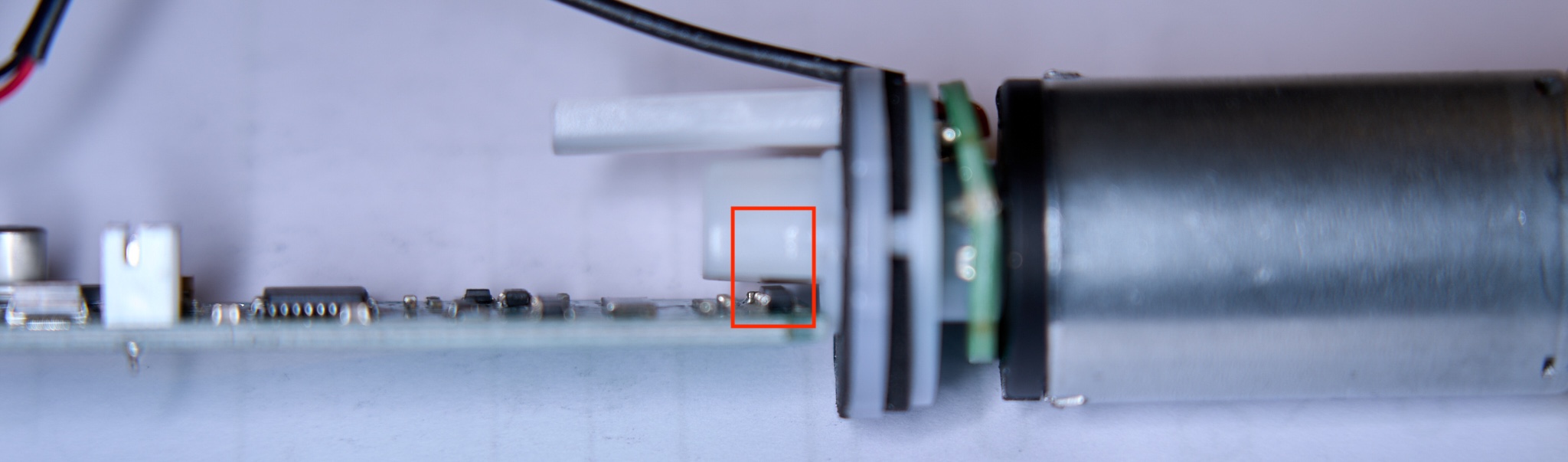
befinden sich tatsächlich zwei Hall-Sensoren vom Typ S360S. Der rotierende Magnet ist auf den platinenseitigen Wellenstumpf des Antriebsmotors aufgesteckt.
Anordnung des rotierenden Magneten (im Bild überwiegend verdeckt) über den Hall-Sensoren auf der Motorplatine
Auch habe ich keinerlei Kupfer-Abrieb im Inneren des Motors vorgefunden. Es gibt also verschiedene Mechanismen, weswegen die FYRTUR-Einheiten versagen können.
Die Rollos gibt es nicht mehr bei Ikea. Ich habe 10 Stück von denen und innerhalb 5 Jahre bestimmt 6x getauscht. Jetzt ist an einem Rollo wohl der Motor abgeraucht und ich werde mich nach was Anderem umsehen müssen
Hey, leider hat es nun auch eins meiner Rollos erwischt.
Hat schon jemand einen Ersatzmotor verbaut bzw. gibt es eine Quelle für diesen?
Grüße Marcel
Um auf die Frage zu antworten: mir ist kein «out-of-the-box» kompatibler Ersatzmotortyp bekannt. Aber da ich mich aktuell intensiver mit kleinen Gleichstrom-Elektromotoren befasse, möchte ich als hardcore Reparaturmethode für die Unerschrockenen unter uns die Beschaffung eines mechanisch kompatiblen Motortyps in die Runde werfen, den man dann durch «Umwickeln» entsprechend den Original-Wicklungsdaten (Drahtdurchmesser 0.22 mm und 107 Windungen je Ankerpol) auch elektrisch «passend» macht. Bzw.: je nach Schadensursache des Original-Motors durch eine Neuwicklung des ursprünglichen Motors. Entfällt natürlich bei unrettbarer Zerstörung des ursprünglichen Kollektors (Kommutators) des Original-Motors.
I have all so 2 blinds which only turn +- 1 sec and then they stop.
I did open the blind and did measure the current from the motor.
I is more then 1A at a voltage (power supply) of 7.2V.
It looks to me that the electronics thinks that the motor is stall (high current) and shut it down.
Even the motor alone is pulling a lot more then the indicated 0.4A.
Possible is the above mentioned metal dust in the motor the problem.
So I am also looking for replacement motor.