
Neulich erhielt ich eine Anfrage von Leser «L.» zum Thema «auftretende Kräfte an einer Pro-Link©-artigen Hinterradaufhängung».

{kind=link}
Im konkreten Fall ging es um eine von Honda im Jahre 1979 eingeführte, «Pro-Link©» genannte Federbeinanlenkung, welche durch Hebelübersetzungen zu einem nichtlinearen, «progressiven» Übersetzungsverhältnis zwischen Hub an der Hinterachse und Federbeinhub führen soll – so die Theorie. Da komme ich im weiteren Verlauf dieses Beitrags noch drauf zurück. Leser «L.» möchte Schwinge, Umlenkhebel und Zugstrebe eines BMW-Motorrads in einen ursprünglich mit einem originalen Pro-Link© System versehenen Honda-Rahmen verpflanzen. Die Verantwortung für die (nicht nur kinematischen) Eigenschaften dieses Hybrids liegen weder bei BMW, noch bei Honda, sondern vollständig beim anfragenden Projekt-Ingenieur «L.». Das vorweg.
Meine Artikelserie zum direkt angelenkten Zentralfederbein, welche ich aus unmittelbarer Betroffenheit als Ducati Monster 1200S-Fahrer aufgelegt hatte, hat anscheinend mit dem Interaktiven Federrechner, dem mit bisher schon über 4’900 Seitenaufrufen unangefochtenen Spitzenreiter in der Gunst der Leser dieses Blogs, einen Nerv des Publikumsinteresses getroffen.
Auch mein Ausflug in die Welt der indirekt angelenkten Federbeine, welche ich mit meinen Betrachtungen über die Kinematik von Ducati V4 Hinterradaufhängungen beleuchtet hatte, hat – entsprechend der Exklusivität derartiger Maschinen – Ihr vergleichbar exklusives Publikum gefunden.
Da mich die Frage der auftretenden Kräfte bisher noch nicht unmittelbar betroffen hatte, bzw. beim direkt angelenkten Zentralfederbein implizit mit abgewickelt worden war, und ich die Thematik spannend finde, bin ich gerne auf die o.a. Anfrage des Lesers eingestiegen. Und hätte mich fast daran verhoben. Aber der Reihe nach:
Leser «L.» hatte mir freundlicherweise die Ergebnisse seiner Fahrwerksvermessung überlassen, so daß ich eine maßstäbliche Illustration bzw. interaktive Animation anfertigen konnte. Hinweis: diese Fahrwerksvermessung bezieht sich auf den o.a. Hybriden aus Honda-Rahmen und BMW-Anbauteilen (Schwinge, Umlenkhebel, Zugstrebe, Federbein), und entspricht daher keinem bisher real existierenden Motorrad.
Zur interaktiven Animation gehts
Regelmäßigen Besuchern dieses Blogs wird diese Illustration bekannt vorkommen, und da täuschen sie sich nur minimal. Auf flüchtigen Blick scheint sie identisch zu sein mit meiner Illustration/Animation zur Kinematik von Ducati V4 Hinterradfederungen, wie die folgende Abbildung zeigt:

Bei beiden Radaufhängungen handelt es sich um Viergelenk-Getriebeketten vom Typ «Doppelschwinge«. Während an der V4-Aufhängung der Umlenkhebel (blau) im Gestell (=Rahmen) gelagert ist und durch die in der Hinterradschwinge gelagerte Zugstrebe (rot) in Bewegung gesetzt wird, ist es bei der Pro-Link© Aufhängung genau umgekehrt: hier ist die Zugstrebe im Gestell (=Rahmen) gelagert, und der Umlenkhebel in der Schwinge. In beiden Fällen ist das untere Federbeinauge (gelb) mit dem freien Gelenk des Umlenkhebels verbunden.
Hauptsächlich soll es hier um Kräfte gehen. Der genaue Blick auf die Feinheiten der vorliegenden Pro-Link© Getriebekette ist aber für das Verständnis des nachfolgenden Rechenwegs unerlässlich.
Die Getriebekette setzt sich in Bewegung, weil von aussen eine Kraft auf sie einwirkt welche im Inneren durch eine entsprechende Federkraft aufgefangen wird. Die Schnittstelle zwischen äusseren und inneren Kräften ist die Schwinge, weshalb ich mit einem Momentengleichgewicht der Schwinge um den Schwingendrehpunkt beginne:

Die Grafik zeigt (maßstäblich) die stilisierte Schwinge als grün-schraffiertes Dreieck im ausgefederten Zustand, bei einem Schwingenwinkel gegenüber der Horizontalen von – 11°. Links im Fadenkreuz der Schwingendrehpunkt und Ursprung des verwendeten Koordinatensystems, in der Mitte der Anlenkpunkt des Umlenkhebels der Pro-Link© Ansteuerung, und rechts die Position der Hinterachse.
Ich beschreibe im Folgenden die zeichnerische Lösung, auf der Basis dieser maßstäblichen Zeichnung.
Die Schwinge befindet sich im Momentengleichgewicht um den Schwingendrehpunkt, wenn das Moment aus Kraft an der Hinterachse (weisser Pfeil) * Schwingenlänge mit umgekehrtem Vorzeichen gleich ist dem Moment aus der Kraft am schwingenseitigen Lager des Umlenkhebels (ebenfalls weisser Pfeil) * Entfernung des Anlenkpunkts des Umlenkhebels von der Schwingenachse.
Die Kraft, mit der die Schwinge auf die Hinterachse drückt, entspricht der Gewichtskraft der gefederten Masse über dem Hinterrad. Die ungefederten Massen der Hinterradaufhängung leisten keinen Beitrag zur Kompression der Feder des Zentralfederbeins. Diese Gewichtskraft wirkt lotrecht zur Welt, der Richtung der Schwerkraft folgend. Die momentenwirksame, senkrecht zum Hebelarm wirkende Kraft an der Hinterachse (weisser Pfeil) ist daher gleich:
Gewichtskraft aus gefederten Massen * Cosinus( Schwingenwinkel )
Für kleine Schwingenwinkel ist der Unterschied zwischen Gewichtskraft und momentenwirksamer Kraft übrigens klein.
Leider wissen wir zunächst wenig über die tatsächlich am Anlenkpunkt des Umlenkhebels an der Schwinge wirksame Kraft. Der dort eingezeichnete weisse Kraftpfeil ist eine rein theoretische Größe, die sich alleine aus dem Momentengleichgewicht um die Schwingenachse ergibt. Ob die Wirkungsrichtung der vom Umlenkhebel auf die Schwinge übertragenen Kraft mit der Richtung dieses weissen Pfeils zusammenfällt, ist sehr fraglich. Tatsächlich gibt es eine unendliche Anzahl möglicher Wirkungsrichtungen der tatsächlich übertragenen Kraft, welche eine gleich große, momentenwirksame (d.h. senkrecht zum Hebelarm wirkende) Kraftkomponente aufweisen würden. Ich habe einmal fünf mögliche Varianten eingezeichnet (orange gestrichelte Pfeile). Es ist unschwer zu erkennen, daß diese orangen Pfeile unterschiedliche Längen aufweisen, also unterschiedlich großen Kräften entsprechen.
Wie finden wir nun die tatsächliche Reaktionskraft zwischen Umlenkhebel und Schwinge (oranger Pfeil)? Das war für mich der Knackpunkt, bis dann endlich der Groschen bei mir fiel:
Durch Einschieben eines Zwischenschritts bestimme ich zunächst die Wirkungsrichtung dieser Reaktionskraft für eine gegebene Winkelstellung von Schwinge und Umlenkhebel, und zwar wiederum über ein Momentengleichgewicht. Diesmal um den Anlenkpunkt des Umlenkhebels «A»:

Der Umlenkhebel befindet sich im Momentengleichgewicht, wenn die Summe der angreifenden Momente gleich Null ist, also:
Ff * lf + Fz * lz = 0
Mit
- Ff: Federkraft
- lf: wirksamer Hebelarm, an dem die Federkraft angreift
- Fz: Zugkraft in der Strebe
- lz: wirksamer Hebelarm, an dem die Zugkraft der Strebe angreift
Die Richtung der Wirkungslinien der beiden Kräfte ist eindeutig bestimmt und führt jeweils durch die beiden Augen von Federbein und Zugstrebe. Es handelt sich um Pendelstützen.
Durch Ausmessen der Längen der beiden Hebelarme lf und lz aus einer maßstäblichen Zeichnung, vorzugsweise einer 2D-CAD-Zeichnung, ergibt sich:
Fz ≈ 1.58 * Ff
Dieses Verhältnis gilt unabhängig von der Höhe der Kräfte, und ist alleine von der Geometrie (Abmessungen, Winkelstellung) von Umlenkhebel sowie von der Richtung von Zugstrebe und Federbein abhängig.
Damit lässt sich nun die Wirkungslinie der resultierenden Reaktionskraft (orange) bestimmen, die im Punkt «A» zwischen Umlenkhebel und Schwinge wirkt:
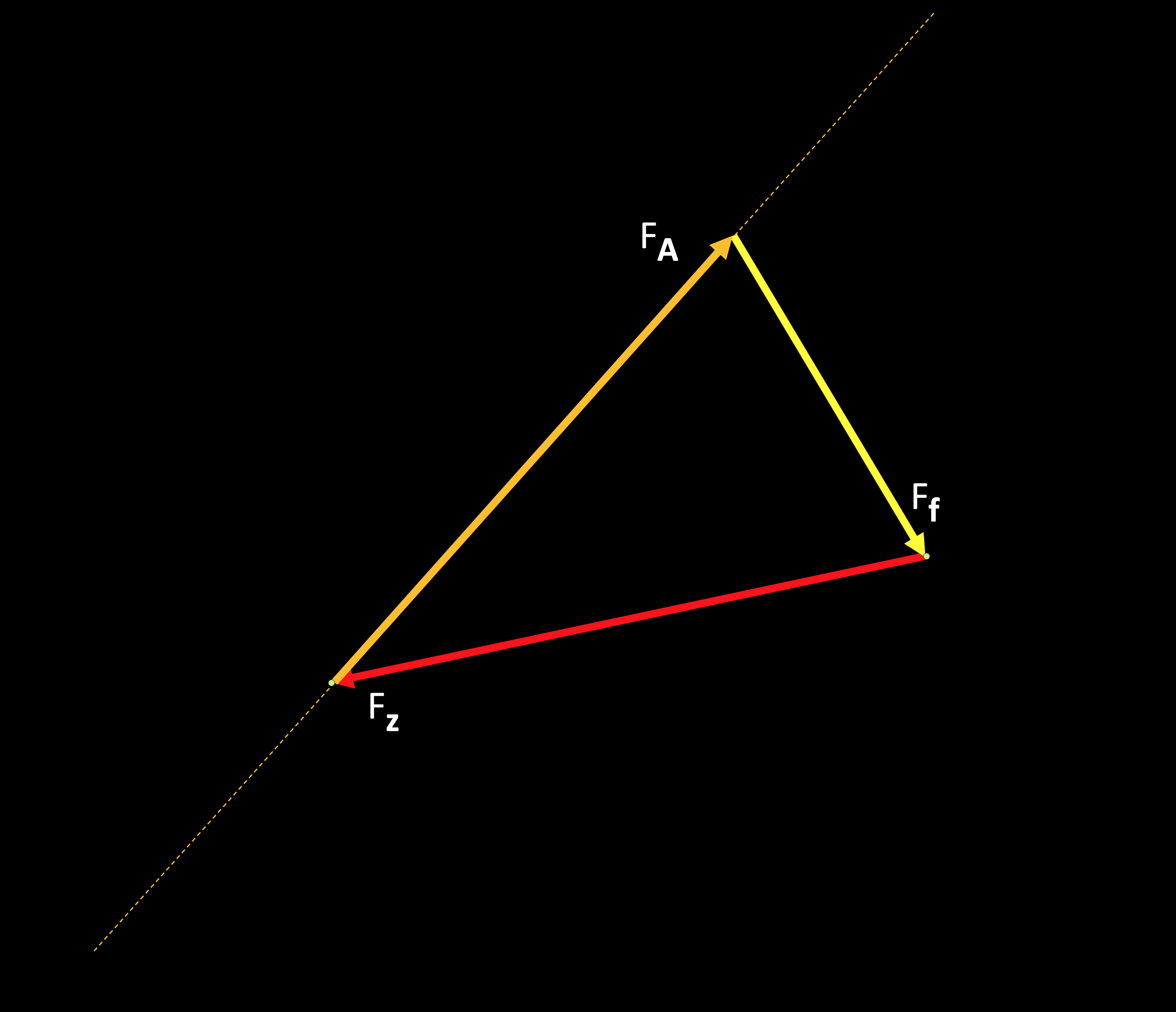
An dieser Stelle kennen wir nun die Richtungen aller drei beteiligten Kraft-Wirkungslinien: Federkraft (gelb), Zugkraft in Strebe (rot) und Lagerkraft im Punkt «A» (orange). Wir wissen zwar im konkreten Fall noch nicht, wie groß die Absolutwerte der einzelnen Kräfte sind. Aber wir wissen, daß für die gegebene Geometrie und Winkelstellungen das Verhältnis der drei Kräfte zueinander immer gleich den jeweiligen Vektorlängen ist. Es handelt sich nämlich um ähnliche Dreiecke:

MIt der nun bekannten Wirkungsrichtung der Reaktionskraft im Punkt «A» kann man zurückkehren zum Momentengleichgewicht an der Schwinge um die Schwingenachse:

Wenn man diese Zeichnung maßstäblich für einen bestimmten Schwingenwinkel erstellt und dann für eine angenommene Gewichtskraft aus gefederten Massen einen maßstäblichen Kraftpfeil (grün) einzeichnet, mit einem Maßstab von z.B.
100 N ≙ 1 cm,
dann lässt sich die momentenwirksame Kraftkomponente (weisser Pfeil) aus dem Schwingenwinkel berechnen oder zeichnerisch durch eine Parallelogramm-Kräftezerlegung in eine senkrecht zum Hebelarm und eine längs zum Hebelarm weisende Komponente zerlegen.
Die am Anlenkpunkt des Umlenkhebels theoretisch erforderliche Kraft für ein Momentengleichgewicht (ebenfalls weisser Pfeil) lässt sich nun bei Kenntnis der Entfernungen der jeweiligen Kraftangriffspunkte von der Schwingenachse exakt berechnen und maßstäblich einzeichnen.
Die tatsächlich am Kraftangriffspunkt wirkende Kraft (oranger Pfeil) lässt sich nun am Kraftangriffspunkt des Umlenkhebels entlang der weiter oben bestimmten Wirkungslinie der Reaktionskraft zwischen Umlenkhebel und Schwinge durch eine Art «inverse Kräftezerlegung» derart bestimmen, das die senkrecht zum Hebelarm wirkende Kraftkomponente exakt gleich dem weissen Pfeil ist.
Bei der vorliegenden Geometrie und einem Schwingenwinkel von -11° ist am Anlenkpunkt des Umlenkhebels an der Schwinge eine Kraft erforderlich, deren Absolutbetrag etwa dem 3.2-fachen der Gewichtskraft aus gefederten Massen an der Hinterachse entspricht. Aus dem geschlossenen Kräftedreieck am Umlenkhebel (s.o.) ergibt sich eine betragsmäßig etwa gleich große Kraft in der Zugstrebe (also auch das ≈ 3.2-fache) während die Federkraft etwa dem 1.95-fachen der Gewichtskraft aus gefederten Massen an der Hinterachse entspricht.
Da sich mit sich verändernder Einfederung die beteiligten Eingriffswinkel verändern, muss dieses zeichnerische Verfahren für geänderte Schwingenwinkel jeweils erneut durchgeführt werden. Das formelmäßig herzuleiten war mir dann doch zuviel Aufwand.
Zum Schluss noch eine Bemerkung zur beworbenen «progressiven» Wirkung einer Pro-Link© Hinterradfederung:
Bei der vorliegenden Geometrie (und es handelt sich wie erwähnt um eine hybride Geometrie aus Honda-Rahmen bzw. -Anlenkpunkten) und BMW-Anbauteilen (Schwinge, Umlenkhebel, Zugstrebe, Federbein) habe ich im Bereich zwischen -120 mm und 0 mm Schwingenhub eine gleichmäßige Übersetzung von 1.93 ± 1.5% ermittelt. Da ist von Progressivität allenfalls eine homöopathische Dosis erahnbar. Für Leser «L.». war dies eine wesentliche Einsicht.
Dabei bestreite ich nicht, daß eine Pro-Link© Hinterradaufhängung grundsätzlich eine Progression erzeugen kann. Allerdings ist für eine spürbare Progression von z.B. 20% oder mehr bei gleichem Aufbau der Getriebekette eine signifikant andere als die hier untersuchte Geometrie (Positionen von rahmenfesten Gelenken, Abmessungen, Winkeln) erforderlich. Wer mag, kann das ja in der Interaktiven Pro-Link Animation einmal ausprobieren. Die hier gezeigten Übersetzungsverhältnisse «Ü» sind so zu verstehen, daß «Ü» mm Hub an der Hinterachse zu einem (1.0) mm Hub am Federbein führen.
Ein Wort der Warnung:
ich habe die Wertebereiche der veränderbaren Parameter großzügig ausgelegt. Nicht alle Parameterkombinationen führen zu einer Beweglichkeit der Getriebekette über den gesamten eingeplanten Schwingen-Hubbereich, infolge des möglicherweise vorzeitigen Erreichens von Deck- bzw. Strecklagen zweier Getriebeglieder. Eine Fehlerbehandlung im Code fehlt nahezu völlig.
Wer vom Simulator einen Gelenkschnittpunkt erwartet zwischen zwei Elementen, die zu kurz sind, oder deren momentane Drehpunkte zu weit voneinander entfernt liegen, kann den Simulator dazu bringen, «sich aufzuhängen». In dem Fall hilft nur ein Neuladen der Seite.