
Es hatte mich schon lange gereizt, die Gültigkeit der meinem Interaktiven 3D Gespann-Simulator zugrunde liegenden Theorie auch einmal in extremen Anwendungsfällen zu testen.

{kind=link}
Als mein Gespann-Simulator vor einem guten Jahr in Heft 179 der Zeitschrift «Motorrad-Gespanne» einer breiten Öffentlichkeit vorgestellt wurde, fand sich zufällig in der gleichen Ausgabe ein Bericht über das Ducati «Kneeler» Renngespann des Teams Hans-Hermann Fett und seines Beifahrers Bernd Riebel. Als Gespann-Interessierter und gleichzeitig Ducati-Fahrer fand ich das genug der Anknüpfungspunkte, nahm Kontakt auf mit Hans-Hermann und bat ihn um einen vollständigen Satz Daten zu seinem Gespann.
Hans-Hermann war sehr hilfsbereit und schickte mir bald einen nahezu kompletten Datensatz – bis auf den benötigten Kippwinkel. Um den Kippwinkel zu ermitteln, müsse er zu viele Verkleidungsteile abmontieren, und so vertröstete er mich auf einen späteren Zeitpunkt. Die Sache war bei mir fast schon in Vergessenheit geraten, als vor etwa vier Wochen eine mail von Hans-Hermann eintraf mit dem lang erwarteten Kippwinkel. 😎
Damit gebührt Hans-Hermann Fett der Pokal des ersten und bisher einzigen Gespannfahrers, der auf meine zahlreichen Bitten hin einen wirklich vollständigen Datensatz für Vergleiche im Gespann-Simulator zur Verfügung gestellt hat. An dieser Stelle ein ganz herzliches Dankeschön und Daumen hoch!!! 😎
Ich habe die nun erstmalig gegebene Möglichkeit, zwei sehr unterschiedliche Gespanne – meine Ural cT und ein Ducati Kneeler Renngespann – bezüglich ihrer Kippstabilität direkt miteinander zu vergleichen. Damit dieser Vergleich auf einen (1) Mausklick hin funktioniert, habe ich meinen Gespann-Simulator zur Version 2.0x weiterentwickelt und das Konzept von «Presets» eingefügt: hart-kodierte Datensätze von bisher (lediglich) zwei verschiedenen Gespannen, die man aus einem Auswahlfeld per Klick anwählen kann.

Zusätzliche Datensätze für weitere Gespanne kann ich ab jetzt leicht einpflegen und sie sind mir immer willkommen. Wenn Du Dein Gespann vermessen hast und dessen Daten gerne veröffentlicht sehen möchtest, nimm bitte Kontakt mit mir auf. Auch wenn Du Hilfe bei der Vermessung benötigst.
Nach erstmaliger Auswahl eines Gespanns werden die folgenden Daten im Gespann-Simulator vor-eingestellt:

Vorab ein Hinweis zum Ducati-Gespann des Teams Fett/Riebel:
in der Realität ist dessen Seitenwagen _links_ angeschlagen. Da ich bei der Konzeption des Gespann-Simulators mit diesem Fall nicht gerechnet hatte, stelle ich deren Gespann in gespiegelter Ausführung dar und verwende die Begriffe «links» und «rechts» passend zur Visualisierung. Die Physik ist zum Glück in dieser Hinsicht symmetrisch.
Wie in den bisherigen Versionen des Gespann-Simulators auch schon, kann jeder einzelne Wert weiterhin innerhalb weiter Grenzen manuell verändert werden:
Wenn man z.B. die beiden bisherigen Gespanne «leer» mit einander vergleichen möchte, also ohne Fahrer und ohne Beifahrer, dann setzt man deren Massen zu Null. Gedankenexperiment: wenn man die leeren Gespanne wie ein ferngesteuertes Modellauto über eine Rennstrecke flitzen lassen könnte …
Das sähe so aus:
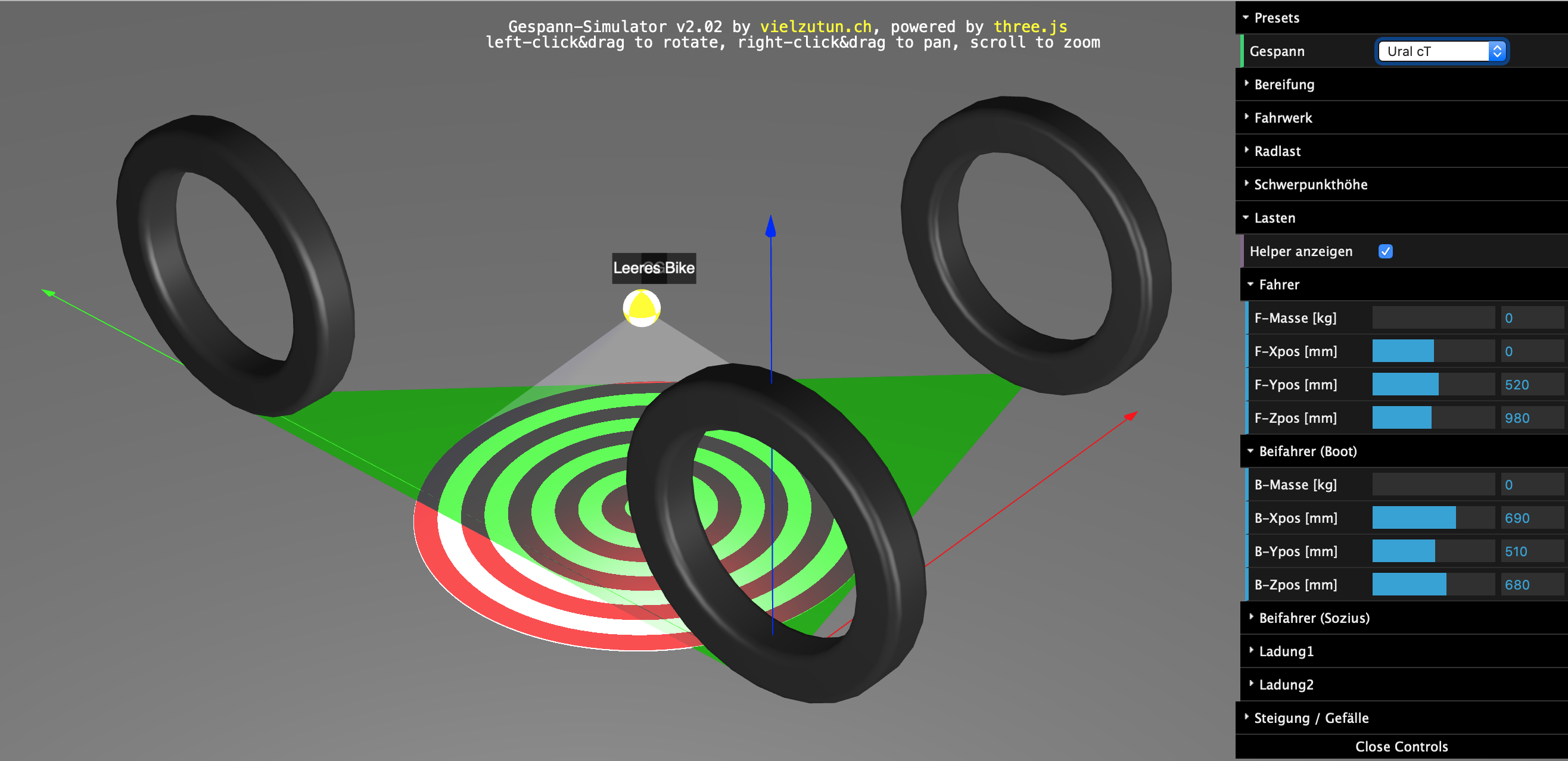

Die Ural cT erreicht ca. 0.6 g an der Kippgrenze, das Ducati Renngespann etwa 0.7 g. Dieser schmale Unterschied erscheint nicht weltbewegend. Schauen wir uns an, was passiert, wenn der Fahrer aufsitzt:


In dieser Disziplin gerät das Ducati Renngespann gegenüber der Ural cT sogar echt ins Hintertreffen: Die Ural cT erreicht nur mit einem Fahrer besetzt die Kippgrenze in Kurven zur Beiwagenseite hin bei etwa 0.41 g, während das Ducati Kneeler Renngespann bereits bei etwa 0.36 g passen muss.
So ein Vergleich ist natürlich unfair. 😉
Gespanne dienen per definitionem dem Transport mindestens eines Beifahrers – typisch im Boot, danach evtl. noch auf dem Soziussitz. Schauen wir uns den ersten Fall an (Passagier im Boot, bzw. auf der Plattform):


Die Ural cT erreicht an der Kippgrenze in Kurven zur Beiwagenseite hin immerhin noch ca. 0.51 g, während das Ducati Kneeler Renngespann selbst mit einem zur Salzsäule erstarrten Beifahrer bereits mit ca. 0.71 g davonzieht.
Nun sind Beifahrer in Renngespannen typischerweise nicht zur Salzsäule erstarrt, sondern erfreuen sich (und nutzen!) bemerkenswerte Freiräume zur Verlagerung ihres Massenschwerpunkts:
So genügt Bernd Riebel bereits eine Verlagerung seines Schwerpunkts um 40 cm zur Beiwagen-seitigen Kurveninnenseite, um die Kippgrenze bis auf 1.0 g heraufzutreiben. Wenn man Fotos seines Einsatzes sieht, glaubt man gerne, das 40 cm für ihn noch nicht das Ende der Fahnenstange darstellen dürften:

{kind=link}
Es ist offensichtlich, daß sich ein eher «touristisch» orientiertes Gespann wie eine Ural cT spätestens an diesem Punkt geschlagen geben muss. Der Passagier im Boot geniesst 1. nicht derartige Bewegungsfreiheit, und ist 2. in aller Regel kaum willens und in der Lage, derartige «Turnübungen» zu veranstalten.
Zudem gibt es konstruktive Unterschiede, die das Ducati Kneeler Renngespann eindeutig für schnelle Kurvenfahrt geeigneter machen:
- die 13″ Bereifung, die gegenüber einer 18″ Bereifung bei der Ural cT den Schwerpunkt bereits um 2.5 Zoll (entsprechend guten 6 cm) absenkt.
- die knieende (=> «kneeler») und beinahe liegende Position des Fahrers, die dessen Schwerpunkthöhe nur bei 60% der Schwerpunkthöhe des Uralfahrers legt, der regelrecht über seiner Maschine thront, während der Ducati Kneeler Fahrer regelrecht in seiner Maschine liegt.
- der bemerkenswert tiefe Schwerpunkt des leeren Gespanns, der konstruktiv (neben den 13″ Rädern) auch einer besonders niedrigen Bodenfreiheit von ca. 7 cm verdankt ist, sowie Details wie einem auf Plattform-Niveau abgesenkten Benzintank und z.B. den unter der geschobenen Vorderradschwinge _hängenden_ Bremssätteln. Details findet man z.B. hier:

P.S.:
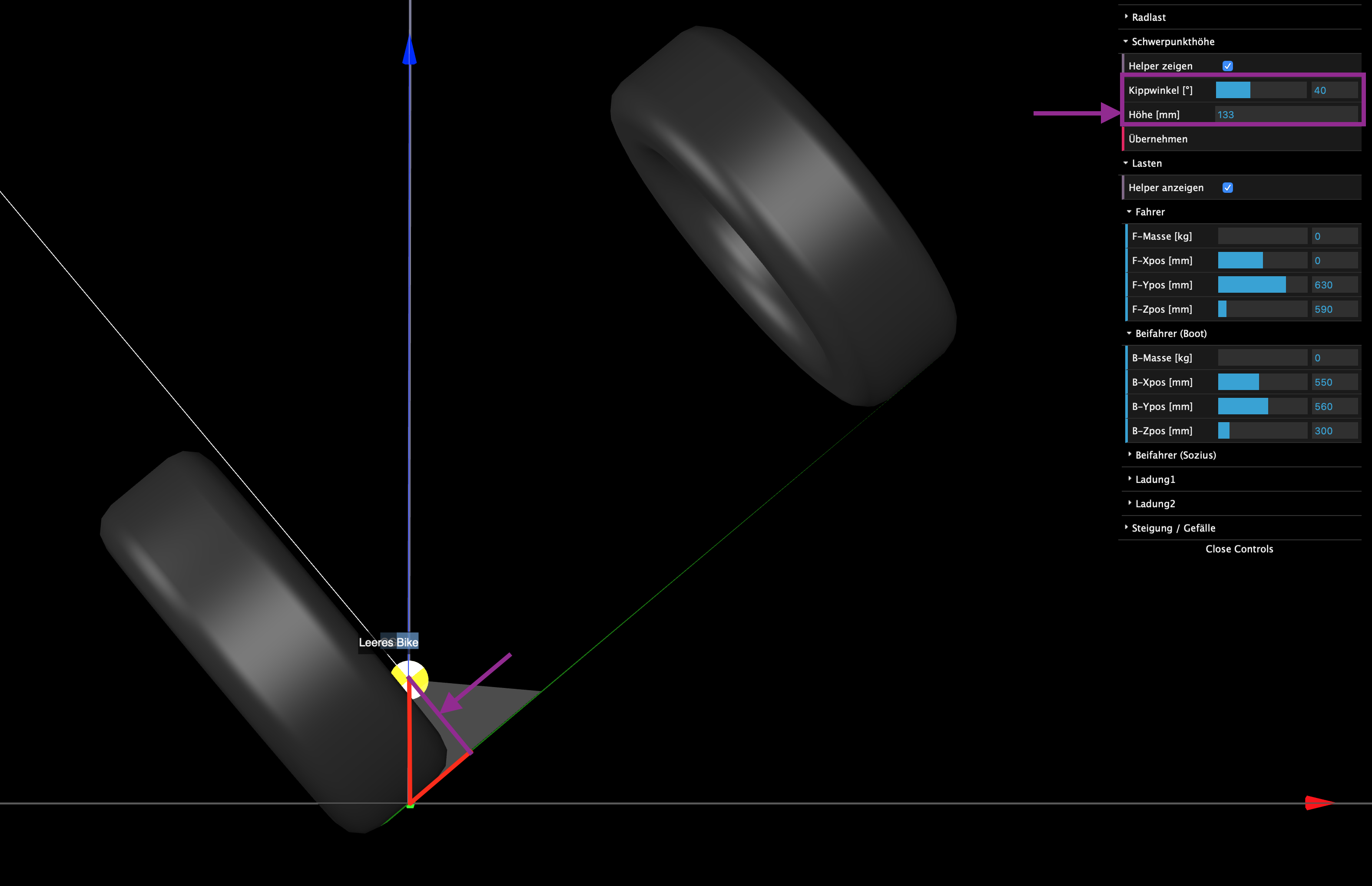
In Version 2.0*, welche hier erreichbar ist, habe ich nicht nur kleinere bugs behoben und die «Presets» eingebaut, sondern auch eine verbesserte und Realitäts-nähere Auswertung (und Visualisierung) des Kippversuchs zur Bestimmung der Schwerpunkthöhe integriert:
Ich war gezwungen anzuerkennen, daß Breitreifen wie in Hans-Hermann Fett’s Renngespann zu einer Vergrößerung der Unterstützungsfläche führen, sowie einer Verlagerung der Kipplinie aus der vertikalen Symmetrieebene von Vorderrad- und Hinterrad hinaus zur Kurvenaussenseite führen. Hieraus errechnet sich regelmäßig eine höhere Schwerpunktlage und ein Erreichen der Kippgrenze bei niedrigeren Querbeschleunigungen. Das ist ein wenig unerfreulich, aber wir wollen uns ja nichts in die Tasche lügen …

P.P.S:
Die neueste Version des Gespann-Simulators erreicht Ihr über den gleichen Link wie bisher.
Hallo Chris,
Ich beschäftige mich grade mit einer neuen Bremse für mein Gespann.
Anhand deines Simulators könnte man doch jetzt auch die nötige Bremskraft für das jeweilige Rad ermitteln.
Also zB Bremskreis 1. vorne und Seitenwagen.
2. Fußbremse für alle 3. oder hinten und Seitenwagen.
Dann noch Belagfläche, alle Kolben und Bremsscheibendurchmesser.
Oder?
Grüße
Oliver
Hallo Oliver,
da hast Du Dir ja etwas vorgenommen!
Richtig ist mMn, daß die übertragbare Bremskraft pro Rad unmittelbar von der momentanen Lastverteilung abhängt, welche, wie Du gesehen hast, hochgradig dynamisch ist. Also von Längs- und Querbeschleunigung, sowie Bergauf- oder Bergabfahrt und deren Kombinationen abhängt. Diese Angaben kann Dir mein Simulator liefern, und es versteht sich vermutlich von selbst, das Du hier keine optimistischen Eingaben vornehmen solltest sondern Dich auf den worst-case vorbereiten solltest. Ehrlich gesagt halte ich Bremsänderungen an einem Gespann für derart sicherheits-kritisch, das ich hierzu keine weiteren Empfehlungen abgeben möchte.
Als Stichwort für Deine weiteren Recherche möchte ich noch «Bremskraftregler» nennen, mittels dessen Du das Seitenwagenrad je nach aktueller statischer Belastung plus dynamischer Be- bzw. Entlastung mit mehr oder weniger Bremsleistung beaufschlagst, so daß Du bei allen Fahrzuständen für das Seitenwagenrad möglichst die optimale Bremsleistung abrufen kannst. Also weder überbremst, noch auf mögliche Bremsleistung verzichtest. Schau mal in diesen thread im Dreiradler Forum, da wirst Du vielleicht fündig.